การกระตุ้นของมอเตอร์กระแสตรง วงจรกระตุ้น ประเภทของวงจรกระตุ้นและสวิตชิ่งสำหรับมอเตอร์กระแสตรง
มอเตอร์กระแสตรงไม่ได้ใช้บ่อยเท่ากับมอเตอร์ เครื่องปรับอากาศ- ด้านล่างนี้เป็นข้อดีและข้อเสีย
เครื่องยนต์ในชีวิตประจำวัน ดี.ซีพบการใช้งานในของเล่นเด็กเนื่องจากใช้พลังงานจากแบตเตอรี่ ใช้ในการคมนาคม: ในรถไฟใต้ดิน รถรางและรถราง และรถยนต์ ในสถานประกอบการอุตสาหกรรม มอเตอร์ไฟฟ้ากระแสตรงใช้ในการขับเคลื่อนหน่วยที่ใช้แบตเตอรี่เพื่อจ่ายไฟอย่างต่อเนื่อง
การออกแบบและบำรุงรักษามอเตอร์กระแสตรง
ขดลวดหลักของมอเตอร์กระแสตรงคือ สมอ,เชื่อมต่อกับแหล่งพลังงานผ่าน อุปกรณ์แปรง- กระดองหมุนในสนามแม่เหล็กที่สร้างขึ้นโดย เสาสเตเตอร์ (ขดลวดสนาม)- ส่วนปลายของสเตเตอร์ถูกหุ้มด้วยเกราะพร้อมลูกปืนซึ่งเพลามอเตอร์กระดองหมุน ด้านหนึ่งติดตั้งอยู่บนเพลาเดียวกัน พัดลมระบายความร้อนขับกระแสอากาศผ่านช่องภายในของเครื่องยนต์ระหว่างการทำงาน
อุปกรณ์แปรงถ่านเป็นองค์ประกอบที่เปราะบางในการออกแบบเครื่องยนต์ แปรงจะถูกบดเข้ากับตัวสับเปลี่ยนเพื่อให้รูปร่างของมันซ้ำได้แม่นยำที่สุดเท่าที่จะเป็นไปได้ และกดเข้ากับตัวสับเปลี่ยนด้วยแรงคงที่ ในระหว่างการใช้งานแปรงจะเสื่อมสภาพและมีฝุ่นที่เป็นสื่อกระแสไฟฟ้าเกาะติดอยู่กับชิ้นส่วนที่อยู่นิ่งและต้องถอดออกเป็นระยะ บางครั้งต้องเคลื่อนย้ายแปรงไปในร่องไม่เช่นนั้นแปรงจะติดอยู่ในนั้นภายใต้อิทธิพลของฝุ่นชนิดเดียวกันและ "แขวน" ไว้เหนือตัวสับเปลี่ยน ลักษณะของมอเตอร์ยังขึ้นอยู่กับตำแหน่งของแปรงในอวกาศในระนาบการหมุนของกระดอง
เมื่อเวลาผ่านไป แปรงจะเสื่อมสภาพและจำเป็นต้องเปลี่ยนใหม่ สับเปลี่ยนที่จุดที่สัมผัสกับแปรงก็เสื่อมสภาพเช่นกัน กระดองจะถูกรื้อออกเป็นระยะและเปิดเครื่องกลึง หลังจากการบด ฉนวนระหว่างแผ่นสับเปลี่ยนจะถูกตัดไปที่ระดับความลึกหนึ่ง เนื่องจากมีความแข็งแรงมากกว่าวัสดุสับเปลี่ยน และจะทำลายแปรงในระหว่างการประมวลผลต่อไป
วงจรเชื่อมต่อมอเตอร์กระแสตรง
การปรากฏตัวของขดลวดสนาม – คุณสมบัติที่โดดเด่นเครื่องดีซี. คุณสมบัติทางไฟฟ้าและทางกลของมอเตอร์ไฟฟ้าขึ้นอยู่กับวิธีเชื่อมต่อกับเครือข่าย
การกระตุ้นที่เป็นอิสระ
ขดลวดกระตุ้นเชื่อมต่อกับแหล่งจ่ายอิสระ ลักษณะของมอเตอร์เหมือนกับมอเตอร์แม่เหล็กถาวร ความเร็วในการหมุนถูกควบคุมโดยความต้านทานในวงจรกระดอง นอกจากนี้ยังถูกควบคุมโดยลิโน่ (การปรับความต้านทาน) ในวงจรขดลวดกระตุ้น แต่ถ้าค่าของมันลดลงมากเกินไปหรือแตก กระแสไฟฟ้าของกระดองจะเพิ่มขึ้นเป็นค่าที่เป็นอันตราย มอเตอร์ที่มีการกระตุ้นแบบอิสระจะต้องไม่สตาร์ทที่ความเร็วรอบเดินเบาหรือมีภาระบนเพลาต่ำ ความเร็วในการหมุนจะเพิ่มขึ้นอย่างรวดเร็วและมอเตอร์จะเสียหาย
วงจรที่เหลือเรียกว่าวงจรตื่นเต้นในตัวเอง
การกระตุ้นแบบขนาน
ขดลวดโรเตอร์และขดลวดกระตุ้นเชื่อมต่อแบบขนานกับแหล่งพลังงานเดียว ด้วยการเชื่อมต่อนี้กระแสที่ผ่านขดลวดกระตุ้นจะน้อยกว่าผ่านโรเตอร์หลายเท่า ลักษณะของมอเตอร์ไฟฟ้ามีความแข็ง ทำให้สามารถนำไปใช้ขับเคลื่อนเครื่องจักรและพัดลมได้
การควบคุมความเร็วในการหมุนทำได้โดยการเชื่อมต่อรีโอสแตตกับวงจรโรเตอร์หรือต่ออนุกรมกับขดลวดกระตุ้น
การกระตุ้นตามลำดับ
ขดลวดสนามมีการเชื่อมต่อแบบอนุกรมกับขดลวดกระดองและกระแสเดียวกันไหลผ่านพวกมัน ความเร็วของเครื่องยนต์นั้นขึ้นอยู่กับโหลดของมัน ไม่สามารถเปิดได้เมื่อไม่ได้ใช้งาน แต่มีลักษณะการสตาร์ทที่ดี ดังนั้นจึงใช้วงจรกระตุ้นแบบอนุกรมในรถยนต์ไฟฟ้า
ความตื่นเต้นแบบผสม
ด้วยรูปแบบนี้จะใช้ขดลวดกระตุ้นสองอันโดยวางคู่กันที่ขั้วของมอเตอร์ไฟฟ้าแต่ละอัน สามารถเชื่อมต่อเพื่อให้สามารถเพิ่มหรือลบโฟลว์ได้ เป็นผลให้มอเตอร์สามารถมีลักษณะคล้ายกับวงจรกระตุ้นแบบอนุกรมหรือแบบขนาน

เพื่อเปลี่ยนทิศทางการหมุนเปลี่ยนขั้วของขดลวดกระตุ้นอันใดอันหนึ่ง เพื่อควบคุมการสตาร์ทมอเตอร์ไฟฟ้าและความเร็วในการหมุนจะใช้การสลับความต้านทานแบบขั้นตอน
กระทรวงศึกษาธิการและวิทยาศาสตร์แห่งสหพันธรัฐรัสเซีย
สถาบันการศึกษาของรัฐด้านการศึกษาวิชาชีพชั้นสูง South Ural State University
สาขาในซลาตูสต์
มอเตอร์กระแสตรง
ZD-431.583.270102
เสร็จสิ้นโดย: Sharipova Y.R.
กลุ่ม: ZD-431
ตรวจสอบโดย: Rumyantsev.E.
1. บทนำ
2. การออกแบบและหลักการทำงานของมอเตอร์กระแสตรง
3. การสตาร์ทเครื่องยนต์
4. ข้อมูลทางเทคนิคของเครื่องยนต์
5. ประสิทธิภาพของมอเตอร์กระแสตรง
6 ลักษณะเฉพาะของมอเตอร์กระแสตรง
6.1 ลักษณะสมรรถนะ
6.2 ลักษณะทางกล
7. รายการข้อมูลอ้างอิงที่ใช้
1.บทนำ
เครื่องใช้ไฟฟ้ากระแสตรงมีการใช้กันอย่างแพร่หลายในอุตสาหกรรมต่างๆ
การแพร่กระจายที่สำคัญของมอเตอร์ไฟฟ้ากระแสตรงอธิบายได้จากคุณสมบัติที่มีคุณค่า ได้แก่ แรงบิดในการสตาร์ท การเบรก และโอเวอร์โหลดสูง ความเร็วที่ค่อนข้างสูง ซึ่งเป็นสิ่งสำคัญในการถอยหลังและการเบรก และความสามารถในการควบคุมความเร็วในการหมุนอย่างกว้างขวางและราบรื่น
มอเตอร์ไฟฟ้ากระแสตรงใช้สำหรับระบบขับเคลื่อนแบบปรับได้ เช่น เพื่อขับเคลื่อนเครื่องมือกลและกลไกต่างๆ พลังของมอเตอร์ไฟฟ้าเหล่านี้สูงถึงหลายร้อยกิโลวัตต์ ในส่วนที่เกี่ยวข้องกับการควบคุมกระบวนการผลิตและกลไกการผลิตแบบอัตโนมัติ ขอบเขตของการประยุกต์ใช้มอเตอร์กระแสตรงกำลังต่ำสำหรับการใช้งานทั่วไปที่มีกำลังตั้งแต่หน่วยไปจนถึงหลายร้อยวัตต์กำลังขยายออกไป
ขึ้นอยู่กับวงจรจ่ายไฟ ขดลวดกระตุ้นของเครื่อง DC แบ่งออกเป็นหลายประเภท (โดยมีอิสระ, ขนาน, อนุกรมและกระตุ้นแบบผสม)
การผลิตเครื่องจักร DC ต่อปีในสหพันธรัฐรัสเซียนั้นน้อยกว่าการผลิตเครื่องจักร AC อย่างมากซึ่งเป็นผลมาจากมอเตอร์กระแสตรงที่มีราคาสูง
ในตอนแรกมีการสร้างเครื่อง DC ต่อจากนั้นส่วนใหญ่ถูกแทนที่ด้วยเครื่องจักรไฟฟ้ากระแสสลับ ด้วยความสามารถในการควบคุมความเร็วในการหมุนได้อย่างราบรื่นและประหยัด มอเตอร์กระแสตรงยังคงมีบทบาทสำคัญในการขนส่ง สำหรับการขับเคลื่อนเครื่องจักรโลหะวิทยา ในเครนและกลไกการยก ในระบบอัตโนมัติ เครื่อง DC ถูกนำมาใช้กันอย่างแพร่หลายเป็นมอเตอร์แอคชูเอเตอร์ มอเตอร์สำหรับขับเคลื่อนกลไกการบันทึกเทปตัวเอง เป็นเครื่องกำเนิดไฟฟ้ากระแสสลับและเครื่องขยายสัญญาณเครื่องจักรไฟฟ้า
2- การออกแบบและหลักการทำงานของมอเตอร์กระแสตรง
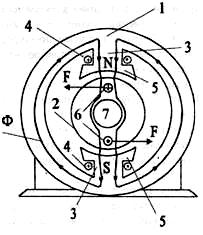
โครงสร้างของเครื่อง DC (เครื่องกำเนิดไฟฟ้าและมอเตอร์) แสดงในรูปแบบที่เรียบง่ายในรูปที่ 1 เสาหลัก 2 และเสาเพิ่มเติม 4 เสาติดอยู่กับตัวเรือนเหล็ก 1 ของสเตเตอร์ของเครื่องจักร บนเสาหลักจะมีขดลวดกระตุ้น 3 บนเสาเพิ่มเติมจะมีการขดลวดของเสาเพิ่มเติม 5 ขดลวดกระตุ้นจะสร้างฟลักซ์แม่เหล็ก F ของเครื่อง
รูปที่ 1
วงจรแม่เหล็กทรงกระบอก 6 จับจ้องไปที่เพลามอเตอร์ 10 ในร่องซึ่งมีขดลวดกระดอง 7 ติดอยู่ ส่วนของขดลวดกระดองติดอยู่กับตัวสับเปลี่ยน 9 นอกจากนี้แปรงคงที่ 8 ก็ถูกกดทับด้วยสปริงด้วย ที่ยึดติดกับเพลามอเตอร์ประกอบด้วยแผ่นทองแดงจำนวนหนึ่ง ด้วยความช่วยเหลือของตัวสับเปลี่ยนและแปรง ขดลวดกระดองจะเชื่อมต่อกับวงจรไฟฟ้าภายนอก ในมอเตอร์ ยังทำหน้าที่แปลงกระแสวงจรภายนอกซึ่งมีทิศทางคงที่ให้เป็นกระแสที่แปรผันไปในทิศทางในตัวนำของขดลวดกระดอง
เสาเพิ่มเติมที่มีขดลวดอยู่จะช่วยลดประกายไฟระหว่างแปรงและตัวสับเปลี่ยนของเครื่อง การพันขดลวดของขั้วเพิ่มเติมจะเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง และมักไม่แสดงบนแผนภาพทางไฟฟ้า
เพื่อลดการสูญเสียพลังงาน วงจรแม่เหล็กกระดองจึงทำจากเหล็กแผ่นแยกกัน ขดลวดทั้งหมดทำจากลวดหุ้มฉนวน นอกจากมอเตอร์ที่มีขั้วหลัก 2 ขั้วแล้ว ยังมีเครื่อง DC ที่มีขั้วหลัก 4 ขั้วขึ้นไปอีกด้วย ในขณะเดียวกัน จำนวนเสาและชุดแปรงเพิ่มเติมก็เพิ่มขึ้นตามไปด้วย
หากมอเตอร์เชื่อมต่อกับเครือข่าย DC ปฏิกิริยาของสนามแม่เหล็กที่สร้างขึ้นโดยขดลวดสนามและกระแสไฟฟ้าในตัวนำกระดองจะสร้างแรงบิดที่กระทำต่อกระดอง:
![]() (1)
(1)
โดยที่ KM เป็นค่าสัมประสิทธิ์ขึ้นอยู่กับพารามิเตอร์การออกแบบของเครื่อง F - ฟลักซ์แม่เหล็กของขั้วเดียว IА - กระแสกระดอง
ถ้าแรงบิดของมอเตอร์ที่ n = 0 เกินแรงบิดในการเบรกที่โหลดมอเตอร์ไว้ กระดองจะเริ่มหมุน เมื่อความเร็วในการหมุน n เพิ่มขึ้น แรงเคลื่อนไฟฟ้าที่เกิดขึ้นในกระดองจะเพิ่มขึ้น สิ่งนี้นำไปสู่การลดลงของกระแสกระดอง:
![]() (3)
(3)
โดยที่ rI คือความต้านทานของกระดอง
ผลที่ตามมาของการลดกระแส I คือแรงบิดของมอเตอร์ลดลง เมื่อแรงบิดของเครื่องยนต์และโหลดเท่ากัน ความเร็วในการหมุนจะหยุดเปลี่ยนแปลง
ทิศทางของแรงบิดของมอเตอร์และทิศทางการหมุนของกระดองขึ้นอยู่กับทิศทางของฟลักซ์แม่เหล็กและกระแสในตัวนำของขดลวดกระดอง หากต้องการเปลี่ยนทิศทางการหมุนของมอเตอร์ คุณต้องเปลี่ยนทิศทางของกระแสกระดองหรือกระแสสนาม
3. การสตาร์ทเครื่องยนต์
จากสูตร (3) เป็นไปตามนั้นในทันทีแรกหลังจากเปิดเครื่องยนต์ในเครือข่ายแรงดันไฟฟ้ากระแสตรงนั่นคือ เมื่อใดและ
เนื่องจากความต้านทาน rI มีขนาดเล็ก กระแสกระดองจึงสูงกว่ากระแสที่กำหนดของมอเตอร์ถึง 10...30 เท่า ซึ่งเป็นที่ยอมรับไม่ได้ เนื่องจากจะทำให้เกิดประกายไฟและการทำลายตัวสับเปลี่ยนอย่างรุนแรง นอกจากนี้ด้วยกระแสไฟฟ้าดังกล่าว แรงบิดของมอเตอร์สูงจนไม่อาจยอมรับได้ และเมื่อสตาร์ทบ่อยครั้ง อาจเกิดความร้อนสูงเกินไปของขดลวดกระดองได้
เพื่อลดกระแสสตาร์ทในวงจรกระดองจะมีตัวต้านทานสตาร์ทรวมอยู่ด้วย ซึ่งความต้านทานจะลดลงเหลือศูนย์เมื่อความเร็วของเครื่องยนต์เพิ่มขึ้น หากการสตาร์ทเครื่องยนต์เป็นแบบอัตโนมัติ ตัวต้านทานสตาร์ทจะประกอบด้วยหลายขั้นตอน ซึ่งจะดับลงตามลำดับเมื่อความเร็วในการหมุนเพิ่มขึ้น
กระดองเริ่มต้นปัจจุบัน
![]()
เมื่อเครื่องยนต์เร่งความเร็ว EMF ในขดลวดกระดองจะเพิ่มขึ้น และจากสูตร (3) ต่อไปนี้จะส่งผลให้กระแสกระดอง IА ลดลง ดังนั้นเมื่อความเร็วของเครื่องยนต์เพิ่มขึ้น ความต้านทานในวงจรกระดองจะลดลง เพื่อให้ได้แรงบิดสตาร์ทที่สูงและมีกระแสไฟฟ้าสตาร์ทค่อนข้างน้อย เครื่องยนต์จะสตาร์ทด้วยฟลักซ์แม่เหล็กสูงสุด ดังนั้นกระแสกระตุ้นเมื่อสตาร์ทต้องเป็นค่าสูงสุดที่อนุญาต เช่น ระบุ
4.ข้อมูลทางเทคนิคของเครื่องยนต์
พาสปอร์ตยานยนต์และเอกสารอ้างอิงสำหรับมอเตอร์กระแสตรงมีข้อมูลทางเทคนิคดังต่อไปนี้: แรงดันไฟฟ้าที่กำหนด Ui, กำลัง Pn, ความเร็วในการหมุน nn, กระแสไฟฟ้าใน, ประสิทธิภาพ
โดยการจัดอันดับ Un เราหมายถึงแรงดันไฟฟ้าที่ขดลวดกระดองและตัวเก็บประจุได้รับการออกแบบ รวมถึงในกรณีส่วนใหญ่ ขดลวดกระตุ้นแบบขนาน โดยคำนึงถึงแรงดันไฟฟ้าที่กำหนดให้เลือกวัสดุฉนวนไฟฟ้าของมอเตอร์
พิกัดกระแสใน – กระแสไฟสูงสุดที่อนุญาต (ใช้จากเครือข่าย) ซึ่งเครื่องยนต์ให้ความร้อนสูงถึงอุณหภูมิสูงสุดที่อนุญาต โดยทำงานในโหมด (ระยะยาว ไม่ต่อเนื่อง ระยะสั้น) ตามที่ได้รับการออกแบบ:
![]()
โดยที่ Iyan คือกระแสกระดองที่โหลดพิกัด Ivn - กระแสขดลวดกระตุ้นที่แรงดันไฟฟ้าที่กำหนด
ควรสังเกตว่ากระแสกระตุ้น Iin ของมอเตอร์กระตุ้นแบบขนานนั้นค่อนข้างเล็ก ดังนั้นที่โหลดพิกัดมักจะถูกนำมาใช้
กำลังไฟพิกัด Рн คือกำลังที่พัฒนาโดยมอเตอร์บนเพลาเมื่อทำงานด้วยพิกัดโหลด (แรงบิด) และที่ความเร็วพิกัด nн
ความเร็วในการหมุนnнและประสิทธิภาพสอดคล้องกับการทำงานของเครื่องยนต์ด้วยกระแส In, แรงดันไฟฟ้า Un โดยไม่มีตัวต้านทานเพิ่มเติมในวงจรมอเตอร์
ในกรณีทั่วไป กำลังเพลา P2 แรงบิด M และความเร็วในการหมุน n มีความสัมพันธ์กันโดยความสัมพันธ์:
กำลัง P1 ที่มอเตอร์ใช้จากเครือข่าย, ค่า P2, ประสิทธิภาพ, U, I สัมพันธ์กันโดยความสัมพันธ์:
แน่นอนว่าความสัมพันธ์เหล่านี้ใช้ได้กับโหมดการทำงานปกติของเครื่องยนต์ด้วย
5. ประสิทธิภาพของมอเตอร์กระแสตรง
ประสิทธิภาพเป็นตัวบ่งชี้ที่สำคัญที่สุดของมอเตอร์กระแสตรง ยิ่งมีขนาดใหญ่เท่าใด กำลัง P และกระแสไฟฟ้าที่มอเตอร์ใช้จากเครือข่ายที่กำลังทางกลเท่ากันก็จะยิ่งน้อยลงเท่านั้น โดยทั่วไปการขึ้นต่อกันจะเป็นดังนี้:
![]() (9)
(9)
การสูญเสียในขดลวดกระดองอยู่ที่ไหน
- การสูญเสียในขดลวดกระตุ้น
- การสูญเสียในวงจรแม่เหล็กกระดอง
- การสูญเสียทางกล
การสูญเสียกำลังมีความเป็นอิสระและขึ้นอยู่กับโหลดของเครื่องยนต์เพียงเล็กน้อย
มอเตอร์ได้รับการออกแบบในลักษณะที่ค่าประสิทธิภาพสูงสุดอยู่ในภูมิภาคใกล้กับกำลังไฟพิกัด เครื่องยนต์ที่ใช้งานที่โหลดต่ำไม่เป็นที่พึงปรารถนาเนื่องจากค่า ri ต่ำ ค่าประสิทธิภาพของมอเตอร์ที่มีวิธีการกระตุ้นที่แตกต่างกันและกำลังตั้งแต่ 1 ถึง 100 kW ที่โหลดพิกัดจะแตกต่างกันและเฉลี่ย 0.8
6.ลักษณะของมอเตอร์กระแสตรง
6.1. ลักษณะการทำงาน
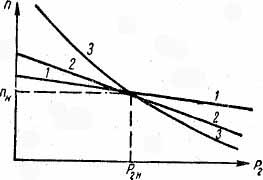
ตราบใดที่เหล็กของไดรฟ์แม่เหล็กของเครื่องไม่อิ่มตัว ฟลักซ์ Ф จะเปลี่ยนไปตามสัดส่วนของกระแสกระตุ้น Iв ในกรณีนี้ ลักษณะการควบคุมจะเป็นแบบไฮเพอร์โบลิก เมื่อมันอิ่มตัวที่กระแสสูง Iv ลักษณะจะเข้าใกล้เส้นตรง (รูปที่ 2) ที่ค่าต่ำของกระแส Iv ความเร็วในการหมุนจะเพิ่มขึ้นอย่างรวดเร็ว ดังนั้นเมื่อวงจรกระตุ้นของเครื่องยนต์ที่ตื่นเต้นแบบขนาน (Iv = 0) ขาด ความเร็วในการหมุนของมันจะถึงขีดจำกัดที่ยอมรับไม่ได้ ดังที่พวกเขากล่าวว่า: "เครื่องยนต์กำลังทำงานอย่างดุเดือด" ข้อยกเว้นอาจเป็นไมโครมอเตอร์ซึ่งมีแรงบิดรอบเดินเบาค่อนข้างมาก M0
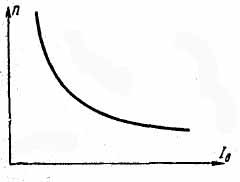
ข้าว. 2. ลักษณะการควบคุมเครื่องยนต์
ในมอเตอร์แบบตื่นเต้นอนุกรม Iв = Iа ที่โหลดต่ำ กระแสกระดอง Ia มีขนาดเล็กและความเร็วในการหมุนอาจสูงเกินไป ดังนั้นจึงไม่สามารถยอมรับการสตาร์ทและการทำงานที่โหลดต่ำได้ ไมโครมอเตอร์ก็เป็นเช่นนั้น ในกรณีก่อนหน้านี้อาจเป็นข้อยกเว้นได้
ลักษณะความเร็ว
ลักษณะความเร็วจะขึ้นอยู่กับความเร็วการหมุน n กับกำลังที่มีประโยชน์ P2 บนเพลามอเตอร์ ถ้าแรงดันไฟฟ้า U ของเครือข่ายและความต้านทาน rv ของรีโอสแตตที่ปรับของวงจรกระตุ้นยังคงไม่เปลี่ยนแปลง เช่น n=f(P2) ด้วย U=const และ rв = const
ข้าว. 3. ลักษณะความเร็ว
เมื่อกระแสกระดองเพิ่มขึ้นและภาระทางกลของมอเตอร์กระตุ้นแบบขนานเพิ่มขึ้น แรงดันไฟฟ้าตกในกระดองจะเพิ่มขึ้นพร้อมกัน และปฏิกิริยาของกระดองจะปรากฏขึ้น ซึ่งโดยปกติจะทำหน้าที่ในลักษณะล้างอำนาจแม่เหล็ก เหตุผลแรกมีแนวโน้มที่จะลดความเร็วในการหมุนของเครื่องยนต์ ประการที่สอง - เพื่อเพิ่ม ผลของแรงดันตกในกระดองมักจะมีผลมากกว่า ดังนั้นลักษณะความเร็วของมอเตอร์กระตุ้นแบบขนานจึงมีลักษณะลดลงเล็กน้อย (เส้นโค้ง 1 รูปที่ 3)
ในมอเตอร์แบบพันแผล กระแสกระดองคือกระแสกระตุ้น เป็นผลให้ลักษณะความเร็วของมอเตอร์ที่มีการกระตุ้นตามลำดับมีลักษณะใกล้เคียงกับไฮเปอร์โบลิก เมื่อโหลดเพิ่มขึ้นเมื่อวงจรแม่เหล็กอิ่มตัว ลักษณะเฉพาะจะกลายเป็นเส้นตรงมากขึ้น (เส้นโค้ง 3 ในรูปที่ 3)
ในมอเตอร์แบบผสม เมื่อเปิดขดลวดตามนั้น คุณลักษณะความเร็วจะอยู่ในตำแหน่งกึ่งกลางระหว่างคุณลักษณะของมอเตอร์กระตุ้นแบบขนานและแบบอนุกรม (เส้นโค้ง 2)
ลักษณะช่วงเวลา
ลักษณะแรงบิดแสดงให้เห็นว่าแรงบิด M เปลี่ยนแปลงอย่างไรโดยการเปลี่ยนแปลงของกำลังที่มีประโยชน์ P2 บนเพลาเครื่องยนต์ หากแรงดันไฟฟ้าเครือข่าย U และความต้านทาน rv ของลิโน่ที่ปรับในวงจรกระตุ้นยังคงไม่เปลี่ยนแปลง เช่น M = f(P2) โดยที่ U=const, rv= const
แรงบิดที่มีประโยชน์บนเพลามอเตอร์
หากความเร็วในการหมุนของมอเตอร์กระตุ้นแบบขนานไม่เปลี่ยนแปลงตามโหลด การพึ่งพาแรงบิด Mmech กับกำลังที่มีประโยชน์จะแสดงเป็นเส้นตรงที่ผ่านจุดกำเนิดของพิกัดแบบกราฟิก ในความเป็นจริง ความเร็วในการหมุนจะลดลงตามภาระที่เพิ่มขึ้น ดังนั้นลักษณะของแรงบิดที่มีประโยชน์จึงโค้งขึ้นเล็กน้อย (เส้นโค้ง 2 รูปที่ 4) ในกรณีนี้ เส้นโค้งแรงบิดแม่เหล็กไฟฟ้า M จะผ่านไปเหนือเส้นโค้งแรงบิดที่มีประโยชน์ Mmech ด้วยค่าคงที่เท่ากับแรงบิดรอบเดินเบา M0 (เส้นโค้ง 1)
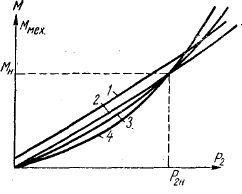
ข้าว. 4. ลักษณะช่วงเวลา
ในมอเตอร์แบบตื่นเต้นอนุกรม ลักษณะของแรงบิดจะเข้าใกล้พาราโบลา เนื่องจากการเปลี่ยนแปลงของแรงบิดจากกระแสโหลดจะเกิดขึ้นตามกฎพาราโบลาจนกระทั่งเหล็กอิ่มตัว เมื่อความอิ่มตัวดำเนินไป การขึ้นต่อกันจะกลายเป็นเส้นตรงมากขึ้น (เส้นโค้ง 4) ในมอเตอร์แบบผสม คุณลักษณะแรงบิด (เส้นโค้ง 3) จะอยู่ในตำแหน่งกึ่งกลางระหว่างคุณลักษณะของมอเตอร์กระตุ้นแบบขนานและแบบอนุกรม
ลักษณะของการเปลี่ยนแปลงประสิทธิภาพ
เส้นโค้งประสิทธิภาพเทียบกับโหลดมีรูปแบบเฉพาะสำหรับเครื่องยนต์ทั้งหมด (รูปที่ 5) เส้นโค้งจะผ่านจุดกำเนิดและเพิ่มขึ้นอย่างรวดเร็วเมื่อกำลังที่มีประโยชน์เพิ่มขึ้นเป็น 1/4 ของกำลังพิกัด ที่กำลังไฟฟ้า P2 เท่ากับประมาณ 2/3 ของกำลังไฟฟ้าที่กำหนด ประสิทธิภาพมักจะถึงค่าสูงสุด เมื่อโหลดเพิ่มขึ้นตามประสิทธิภาพที่กำหนด ประสิทธิภาพจะคงที่หรือลดลงเล็กน้อย
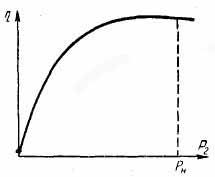
ข้าว. 5. การเปลี่ยนแปลงประสิทธิภาพของเครื่องยนต์
6.2 ลักษณะทางกล
คุณลักษณะที่สำคัญที่สุดของเครื่องยนต์คือกลไก n(M) มันแสดงให้เห็นว่าความเร็วของเครื่องยนต์ขึ้นอยู่กับแรงบิดที่พัฒนาขึ้นอย่างไร หากใช้แรงดันไฟฟ้าที่กำหนดกับขดลวดมอเตอร์และไม่มีตัวต้านทานเพิ่มเติมในวงจร แสดงว่ามอเตอร์มีลักษณะทางกลที่เรียกว่าเป็นธรรมชาติ ในลักษณะธรรมชาติจะมีจุดที่สอดคล้องกับข้อมูลระบุของเครื่องยนต์ (Mn, Rya ฯลฯ ) หากแรงดันไฟฟ้าบนขดลวดกระดองน้อยกว่าแรงดันไฟฟ้าที่กำหนดหรือ Iv< Iвн, то двигатель будет иметь различные искусственные механические характеристики. На этих характеристиках двигатель работает при пуске, торможении, реверсе и регулировании частоты вращения.
เมื่อแปลงนิพจน์ (3) ด้วยความเคารพต่อความเร็วในการหมุน เราได้สมการของคุณลักษณะทางไฟฟ้าเครื่องกล n(Iа):
![]() (7)
(7)
หลังจากแทนที่ Iа ปัจจุบันในสมการ (7) ตามสูตร (1) เราจะได้สมการสำหรับลักษณะทางกล n(M):
![]() (8)
(8)
เมื่อ Ф = const ลักษณะเฉพาะของระบบเครื่องกลไฟฟ้า n(Iа) และกลไก n(М) ของมอเตอร์กระตุ้นแบบขนานจะเป็นเส้นตรง เนื่องจากฟลักซ์แม่เหล็กเปลี่ยนแปลงเล็กน้อยเนื่องจากปฏิกิริยากระดอง ลักษณะจึงค่อนข้างแตกต่างจากแบบตรง
เมื่อเดินเบา (M = 0) เครื่องยนต์จะมีความเร็วรอบเดินเบาซึ่งกำหนดโดยเทอมแรกของสมการ (8) เมื่อภาระเพิ่มขึ้น n จะลดลง ดังต่อไปนี้จากสมการ (8) สิ่งนี้อธิบายได้โดยการมีอยู่ของความต้านทานกระดอง r
เนื่องจาก r ไม่มาก ความเร็วของเครื่องยนต์จึงเปลี่ยนแปลงเล็กน้อยตามแรงบิดที่เพิ่มขึ้น และเครื่องยนต์มีลักษณะทางกลตามธรรมชาติที่เข้มงวด (รูปที่ 6 ลักษณะที่ 1)
จากสมการ (8) พบว่าความเร็วในการหมุนสามารถปรับได้ที่โหลดคงที่ที่กำหนด (M = const) ได้สามวิธี:
ก) การเปลี่ยนแปลงความต้านทานของวงจรกระดอง
b) การเปลี่ยนฟลักซ์แม่เหล็กของมอเตอร์
c) การเปลี่ยนแรงดันไฟฟ้าที่ขั้วกระดอง
ข้าว. 6 ลักษณะทางกล
เพื่อควบคุมความเร็วในการหมุนด้วยวิธีแรกในวงจรกระดอง ต้องเปิดความต้านทานเพิ่มเติม จากนั้นจะต้องแทนที่ความต้านทานในสมการ (8) ด้วย rя + rд
จากสมการ (8) ดังต่อไปนี้ ความเร็วในการหมุน n สัมพันธ์กับความต้านทานของวงจรกระดอง rя + rд ที่โหลดคงที่ (M = const) โดยการพึ่งพาเชิงเส้น เช่น เมื่อความต้านทานเพิ่มขึ้น ความเร็วในการหมุนจะลดลง ความต้านทานที่แตกต่างกัน rd สอดคล้องกับคุณลักษณะเชิงกลเทียมต่างๆ ซึ่งหนึ่งในนั้นแสดงไว้ในรูปที่ 2 (คุณลักษณะที่ 2) เมื่อใช้คุณลักษณะ 2 ที่แรงบิด M1 ที่กำหนด คุณจะได้ความเร็วในการหมุน n2
การเปลี่ยนความเร็วในการหมุนในวิธีที่สองทำได้โดยใช้แหล่งจ่ายแรงดันไฟฟ้าที่ปรับได้ UD2 ด้วยการเปลี่ยนแรงดันไฟฟ้าด้วยตัวควบคุม R2 คุณสามารถเปลี่ยน IB กระแสกระตุ้นและด้วยเหตุนี้ฟลักซ์แม่เหล็กของมอเตอร์ ดังที่เห็นได้จากสมการ (8) ที่โหลดคงที่ (M = const) ความเร็วในการหมุนขึ้นอยู่กับฟลักซ์แม่เหล็ก F อย่างซับซ้อน การวิเคราะห์สมการ (8) แสดงให้เห็นว่าในช่วงหนึ่งของการเปลี่ยนแปลงของสนามแม่เหล็ก ฟลักซ์ F การลดลงในระยะหลังทำให้ความเร็วในการหมุนเพิ่มขึ้น เป็นช่วงของการเปลี่ยนแปลงการไหลนี้ซึ่งใช้ในการควบคุมความเร็วในการหมุน
ค่าฟลักซ์แม่เหล็กแต่ละค่าสอดคล้องกับลักษณะทางกลเทียมของมอเตอร์ ซึ่งหนึ่งในนั้นแสดงไว้ในรูปที่ 2 (ลักษณะที่ 4) เมื่อใช้คุณลักษณะ 4 ที่แรงบิด M1 คุณจะได้ความเร็วในการหมุน n4
เพื่อควบคุมความเร็วในการหมุนโดยการเปลี่ยนแรงดันไฟฟ้าที่ขั้วกระดอง จำเป็นต้องมีแหล่งจ่ายแรงดันไฟฟ้าที่ปรับได้ค่อนข้างทรงพลัง ค่าแรงดันไฟฟ้าแต่ละค่าสอดคล้องกับลักษณะทางกลเทียมของเครื่องยนต์ ซึ่งหนึ่งในนั้นแสดงในรูปที่ 2 (ลักษณะที่ 3) การใช้คุณลักษณะ 3 ที่แรงบิดที่กำหนด M1 สามารถรับความเร็วในการหมุน n3 ได้
ลักษณะคงที่ของเครื่องยนต์ ได้รับคุณลักษณะทางไฟฟ้าเครื่องกลตามธรรมชาติ ศึกษาคุณลักษณะทางสถิตและไดนามิกในระบบเครื่องกลไฟฟ้ามวลเดียวด้วยมอเตอร์กระแสตรง การกระตุ้นที่เป็นอิสระ.
คำอธิบายแผนภาพระบบ G-D โครงสร้างและองค์ประกอบหลัก วัตถุประสงค์ การคำนวณกระบวนการแม่เหล็กไฟฟ้าของเครื่องควบคุมกระแสกระตุ้นของเครื่องกำเนิดพัลส์ การคำนวณค่ากระแสเฉลี่ยสำหรับค่าที่กำหนดของรอบการทำงานของพัลส์ควบคุม
หลักการทำงานและการออกแบบเครื่องกำเนิดไฟฟ้ากระแสตรง ประเภทของขดลวดกระดอง วิธีการของเครื่องกำเนิดไฟฟ้ากระแสตรงที่น่าตื่นเต้น การย้อนกลับของเครื่อง DC มอเตอร์กระตุ้นแบบขนาน แบบอิสระ แบบอนุกรม และแบบผสม
เครื่องยนต์ประเภทหลักคือสองจังหวะและสี่จังหวะ การออกแบบเครื่องยนต์สองจังหวะ การเผาไหม้ภายใน- หลักการจุดระเบิดของเครื่องยนต์ ประวัติความเป็นมาของการสร้างและหลักการทำงานของมอเตอร์ไฟฟ้า วิธีการของมอเตอร์กระแสตรงที่น่าตื่นเต้น
การคำนวณเชิงวิเคราะห์ของมอเตอร์กระแสตรงคอมมิวเตเตอร์ที่ตื่นเต้นด้วยแม่เหล็กถาวรเฟอร์ไรต์-แบเรียม ขนาดเครื่องยนต์. การเลือกขดลวดกระดอง การคำนวณพารามิเตอร์ของตัวสับเปลี่ยนและแปรง การสูญเสียและประสิทธิภาพ
การทำงานและการออกแบบมอเตอร์กระแสตรง ด้วยการหมุนเครื่องกำเนิดไฟฟ้ากระแสตรงด้วยแรงภายนอกเราจะใช้พลังงานกล Pmech และในเครือข่ายเราได้รับพลังงานไฟฟ้า Rel ที่สอดคล้องกัน
การกำหนดค่าของลักษณะการหมุนของเครื่องยนต์จำนวนหนึ่ง การคำนวณขนาดของกระแสสวิตชิ่งของสเตจลิโน่ การแสดงกราฟิกของคุณลักษณะอิเล็กโทรไดนามิกของเครื่องยนต์และค่าความเร็วในการหมุน แผนภาพวงจรสำหรับเชื่อมต่อตัวต้านทานสตาร์ท
คุณสมบัติและคุณลักษณะของเครื่องกำเนิดไฟฟ้าแบบซิงโครนัส การสูญเสียพลังงานเมื่อแปลงพลังงานกลเป็นพลังงานไฟฟ้าในเครื่องกำเนิดไฟฟ้าแบบซิงโครนัส ความเสถียรและความจุเกินพิกัดที่เพิ่มขึ้นของเครื่องกำเนิดไฟฟ้า คุณสมบัติของการทำงานของเครื่องกำเนิดไฟฟ้าแบบขนาน
มอเตอร์กระตุ้นแบบอิสระและแบบขนาน
แผนภาพวงจรสำหรับการเปิดมอเตอร์กระตุ้นอิสระแสดงในรูปที่ 1
5.19.
สามารถรวมความต้านทานเพิ่มเติม R d ไว้ในวงจรกระดองได้ เช่น ลิโน่สตาร์ท เพื่อควบคุมกระแสกระตุ้น สามารถรวมรีโอสแตต R p ที่ปรับค่าไว้ในวงจรขดลวดกระตุ้นได้ ในมอเตอร์กระตุ้นแบบขนาน ขดลวดกระดองและขดลวดกระตุ้นจะเชื่อมต่อกับแหล่งพลังงานเดียวกันและแรงดันไฟฟ้าจะเท่ากัน ดังนั้น มอเตอร์กระตุ้นแบบขนานจึงถือได้ว่าเป็นมอเตอร์กระตุ้นอิสระที่ Ui = Uv
ลักษณะทางกล
ลักษณะทางกลของเครื่องยนต์มักจะแบ่งออกเป็นธรรมชาติและประดิษฐ์ ลักษณะตามธรรมชาติสอดคล้องกับแรงดันไฟฟ้าที่กำหนดและไม่มีความต้านทานเพิ่มเติมในวงจรขดลวดมอเตอร์ หากไม่ตรงตามเงื่อนไขที่ระบุไว้อย่างน้อยหนึ่งข้อ ลักษณะดังกล่าวจะเรียกว่าเทียม สมการของคุณลักษณะทางกลไฟฟ้า ω=f(I i) และสมบัติทางกล ω=f(M em.) สามารถพบได้จากสมการสมดุลของแรงเคลื่อนไฟฟ้าและความเครียดสำหรับโซ่สมอ
เครื่องยนต์เขียนตามกฎข้อที่สองของ Kirchhoff:
คุณ ผม =E ผม +ผม ผม)(R ผม +R d), (5.35)
โดยที่ R i คือความต้านทานเชิงรุกของกระดอง
การแปลง (5.35) โดยคำนึงถึง (5.6) เราได้รับสมการของลักษณะทางไฟฟ้าเครื่องกล
ω=(คุณ ฉัน -ฉัน ฉัน (R ฉัน +R d))/kФ
(5.36)
ตาม (5.10) กระแสเกราะ ผม ผม =M em /kФ และนิพจน์ (5.36) จะถูกแปลงเป็นสมการคุณลักษณะทางกล:
ω=U ฉัน / kФ – (R i + R d)/(kФ) 2)M em. - (5.37)
สมการนี้สามารถแสดงเป็น ω= ω o.id - Δ ω ที่ไหน
ω o.id =U ฉัน /kФ (5.38)
ω o.id - ความเร็วเชิงมุมของความเร็วรอบเดินเบาในอุดมคติ (ที่ I i =0 และตามนั้น M em. =0) Δ ω= ม. [(R i +R d)/(kФ) 2 ] – การลดความเร็วเชิงมุมเนื่องจากภาระบนเพลามอเตอร์และเป็นสัดส่วนกับความต้านทานของโซ่กระดอง
ตระกูลของลักษณะทางกลที่แรงดันกระดองที่กำหนดและฟลักซ์การกระตุ้นและความต้านทานเพิ่มเติมต่างๆ ในวงจรกระดองจะแสดงในรูปที่ 1 5.20 ก.
รูปที่.5.20 โดยทั่วไปลักษณะทางกลของเครื่องยนต์จะได้รับการประเมินโดยตัวบ่งชี้ 3 ประการ ได้แก่ ความเสถียร ความแข็งแกร่ง และความเป็นเส้นตรงสอดคล้องกับ (5.37) ที่ R d =0 แสดงเป็นเส้นตรง 1 ลักษณะเฉพาะทางกลเป็นแบบเส้นตรง การเบี่ยงเบนจากกฎเชิงเส้นอาจเกิดจากปฏิกิริยากระดองซึ่งนำไปสู่การเปลี่ยนแปลงของฟลักซ์ F ลักษณะนี้มีความแข็งเนื่องจากเมื่อแรงบิดของโหลดและด้วยเหตุนี้ความเร็วจึงเปลี่ยนไปฟลักซ์การกระตุ้นจะไม่เปลี่ยนแปลง ความแข็งแกร่งของคุณลักษณะลดลงเมื่อมีการนำความต้านทานเพิ่มเติมเข้าสู่วงจรกระดอง (เส้นตรง 2 และ 3 เป็นคุณลักษณะรีโอสแตติกเทียม) คุณลักษณะมีความเสถียร เนื่องจาก dω/dM em
ฉัน = (U i -E i)/(R i + R d)=(U i -kωФ;)/(R i R d), (5.39)
เพิ่มขึ้น ดังนั้น โมเมนต์แม่เหล็กไฟฟ้าจะเพิ่มขึ้นเป็นค่าใหม่ของโมเมนต์ความต้านทาน (การเปลี่ยนจากจุด A ไปยังจุด B ตามลักษณะทางกล)
โดยการเปรียบเทียบ ตาม (5.37) สามารถสร้างตระกูลที่มีลักษณะเฉพาะเทียมได้ ความหมายที่แตกต่างกัน U i หรือ F. การวิเคราะห์คุณลักษณะดังกล่าวจะดำเนินการในส่วนของมอเตอร์แอคชูเอเตอร์กระแสตรง (§ 5.7)
ลักษณะการทำงาน
ลักษณะการทำงานของเครื่องยนต์ขึ้นอยู่กับความเร็วเชิงมุม ω, แม่เหล็กไฟฟ้า M em และแรงบิดและประสิทธิภาพ M 2 ที่เป็นประโยชน์ η จากกำลังเชิงกลที่มีประโยชน์บนเพลามอเตอร์ P 2 =M 2 ω ที่แรงดันไฟฟ้าที่กำหนดและไม่มีความต้านทานเพิ่มเติม (รูปที่ 5.20, b)
อย่างไรก็ตาม สำหรับเครื่องยนต์ที่อยู่ระหว่างการพิจารณา คุณลักษณะด้านประสิทธิภาพไม่ได้ถูกสร้างขึ้นตามกำลังที่มีประโยชน์ของเครื่องยนต์ P 2 แต่เป็นหน้าที่ของกระดองปัจจุบัน I I สิ่งนี้อธิบายได้จากข้อเท็จจริงที่ว่าในมอเตอร์กระแสตรง พลังงานไฟฟ้าที่ใช้ในการแปลงเป็นพลังงานกลจะถูกส่งผ่านวงจรกระดอง กระแสกระดองของมอเตอร์กระตุ้นอิสระและแบบขนานซึ่งความเร็วขึ้นอยู่กับโหลดเล็กน้อยนั้นเกือบจะเป็นสัดส่วนโดยตรงกับกำลัง P 2 . สมการของลักษณะการทำงานในแง่ของกระแส II นั้นหาได้ง่ายกว่ามาก ลักษณะ ω= f(I i) และ M em =a(I i) สามารถสร้างขึ้นได้ตามสมการ (5.36) และ (5.10) โดยไม่คำนึงถึงปฏิกิริยาของกระดอง ลักษณะเหล่านี้เป็นเส้นตรง รถยนต์จริงภายใต้อิทธิพลของปฏิกิริยากระดอง (การเปลี่ยนแปลงของ F) ลักษณะอาจไม่เป็นเชิงเส้น
ส่วนประกอบที่เป็นประโยชน์ของแรงบิดเครื่องยนต์ M 2 นั้นน้อยกว่าแรงบิดแม่เหล็กไฟฟ้าด้วยค่าของแรงบิดรอบเดินเบา M 0 =(ΔP mech. +ΔP m)/ ω โดยที่ ΔP mech – การสูญเสียกำลังทางกล (แรงเสียดทาน) Δ P m – การสูญเสียแม่เหล็ก
ลักษณะของแรงบิดที่มีประโยชน์ M 2 และประสิทธิภาพ η เริ่มต้นจากจุดไม่มีโหลดจริงซึ่งสอดคล้องกับกระแสกระดอง I ao (รูปที่ 5.20, b) เส้นโค้งประสิทธิภาพมีลักษณะทั่วไปสำหรับเครื่องจักรไฟฟ้าทั้งหมดเพราะว่า ในมอเตอร์มีการสูญเสียอย่างต่อเนื่อง (ΔP mech. +ΔP m +U ใน I c) ในทางปฏิบัติไม่ขึ้นอยู่กับโหลด (กระแสกระดอง) และการสูญเสียตัวแปรในกระดอง I 2 I R I
การควบคุมความเร็ว
ความเร็วเชิงมุมของเครื่องยนต์ ณ โมเมนต์ความต้านทานคงที่สามารถปรับได้ (ดู (5.37)) ได้สามวิธี:
1) กระดอง - การเปลี่ยนแปลงแรงดันไฟฟ้าบนขดลวดกระดอง U i;
2) ขั้ว – การเปลี่ยนแปลงของฟลักซ์การกระตุ้นแม่เหล็ก Ф ใน;
3) กระแสคงที่ - การเปลี่ยนความต้านทานเพิ่มเติม R d ในวงจรกระดอง
คุณลักษณะการควบคุมของมอเตอร์ที่ถูกกระตุ้นอย่างอิสระด้วยกระดองและวิธีควบคุมขั้วจะถูกกล่าวถึงโดยละเอียดในส่วนของมอเตอร์แอคชูเอเตอร์ (ดู §5.7) ด้วยวิธีลิโน่สแตท จะต้องส่งกระแสไฟฟ้าที่มีนัยสำคัญผ่านลิโน่สแตท R d (ดูรูปที่ 5.19) เป็นเวลานาน ซึ่งทำให้สูญเสียพลังงานจำนวนมาก ดังนั้น วิธีการนี้จึงไม่ประหยัดและไม่ค่อยได้ใช้
เริ่ม.
ตามสมการสมดุลโมเมนต์ (2.29) เงื่อนไขในการสตาร์ทเครื่องยนต์คือความไม่เท่าเทียมกัน M p >M st หากตรงตามเงื่อนไขนี้ เมื่อเครื่องยนต์เปิด โรเตอร์จะเริ่มเคลื่อนที่และเร่งความเร็วให้อยู่ในสถานะคงที่ เนื่องจากโรเตอร์มีโมเมนต์ความเฉื่อย จึงไม่สามารถเร่งความเร็วได้ในทันที - ความเร็วจะเพิ่มขึ้นตามกฎที่ใกล้เคียงกับเลขชี้กำลัง
การสตาร์ทมอเตอร์กระแสตรงนั้นซับซ้อนเนื่องจากที่ ω=0 EMF E i =0 และกระแสกระดองเริ่มต้น I ar = U i / R i สามารถสูงกว่ากระแสไฟฟ้าที่กำหนดได้ 10 - 20 เท่าซึ่งเป็นอันตรายต่อทั้ง มอเตอร์ (เพิ่มประกายไฟ, ไดนามิกโอเวอร์โหลด ) และสำหรับแหล่งพลังงาน ดังนั้นตัวบ่งชี้ที่สำคัญที่สุดของโหมดเริ่มต้นคือหลายหลากของกระแสเริ่มต้น K ip = I p / I nom และหลายหลากของแรงบิดเริ่มต้น K mp = M p / M nom เมื่อสตาร์ท จำเป็นต้องตรวจสอบให้แน่ใจว่าแรงบิดสตาร์ทหลายเท่าที่ต้องการพร้อมกับกระแสสตาร์ทตัวคูณต่ำสุดที่เป็นไปได้
การสตาร์ทโดยตรงมักจะใช้กับกระแสหลายหลากเริ่มต้นที่ K iп?6 ที่ มูลค่าที่สูงขึ้นวิธีการเริ่มต้น K iп ใช้เพื่อให้แน่ใจว่ากระแส I ip ลดลงโดยการใช้แรงดันไฟฟ้าที่ลดลงกับขดลวดกระดองหรือโดยการแนะนำความต้านทานเพิ่มเติมในวงจรกระดอง วิธีแรกใช้เป็นหลักเมื่อควบคุมเครื่องยนต์ในระบบควบคุมอัตโนมัติด้วยวิธีควบคุมพุก วิธีที่สองเรียกว่า rheostatic เป็นวิธีที่แพร่หลายที่สุดในไดรฟ์ที่ไม่มีการควบคุม ความต้านทานของลิโน่สตาร์ท R p = R d (ดูรูปที่ 5.19) ถูกเลือกเพื่อจำกัด I r ไว้ที่ (1.4 - 1.8) I r สำหรับเครื่องยนต์ที่มีกำลังปานกลางและถึง (2.0 - 2.5 ) I ใช้สำหรับพลังงานต่ำ เครื่องยนต์ เมื่อกระดองเร่งความเร็ว กระแสกระดองจะลดลง และลิโน่สตาร์ทจะค่อยๆ ถูกกำจัดออก
การถอยหลัง
การย้อนกลับของมอเตอร์ทำได้โดยการเปลี่ยนขั้วของแรงดันไฟฟ้าบนขดลวดกระดองหรือบนขดลวดสนาม ในทั้งสองกรณี สัญญาณของแรงบิดแม่เหล็กไฟฟ้าของมอเตอร์ M em และทิศทางการหมุนของโรเตอร์ก็เปลี่ยนไปด้วย
การเบรก
สำหรับมอเตอร์กระตุ้นแบบอิสระและแบบขนาน โหมดการเบรกสามารถทำได้สามโหมด: การเบรกแบบจ่ายพลังงานใหม่ การเบรกแบบทวนเข็มนาฬิกา และการเบรกแบบไดนามิก เมื่อวิเคราะห์โหมดการเบรก จำเป็นต้องสร้างคุณลักษณะทางกลของเครื่องจักรในจตุภาคทั้งสี่ของระนาบ M em, ω ในการสร้างคุณลักษณะทางกล คุณสามารถใช้สมการเดียวกัน (5.37) โดยคำนึงถึงเครื่องหมาย M em ในโหมดการทำงานที่แตกต่างกันของเครื่อง
การเบรกแบบสร้างใหม่หรือการเบรกแบบสร้างใหม่โดยการปล่อยพลังงานเข้าสู่โครงข่ายสามารถทำได้ที่ ω>ω o.d. ในกรณีนี้ เกราะ EMF E I > U I (ดู (5.6) และ (5.38)) กระแสกระดองเปลี่ยนทิศทาง เครื่องจักรจะเข้าสู่โหมดเครื่องกำเนิดไฟฟ้า และแรงบิดแม่เหล็กไฟฟ้าจะเกิดการเบรก ลักษณะทางกลในโหมดการเบรกแบบสร้างใหม่คือความต่อเนื่องของลักษณะทางกลของเครื่องยนต์ในควอดรันต์ II (ω>0, M em (รูปที่ 5.21, a, U i2
ข้าว. 5.21
ในขณะที่แรงดันไฟฟ้าลดลง เครื่องยนต์จะเคลื่อนจากจุด A ของคุณลักษณะ 1 ไปยังจุด B ของคุณลักษณะ 2 ช่วงเวลาที่ M em เปลี่ยนสัญญาณ และการเบรกของเครื่องยนต์เริ่มที่จุด C การเบรกเพื่อหยุดในลักษณะนี้เป็นไปไม่ได้และใช้งานแล้ว ส่วนใหญ่เมื่อเบรกด้วยความเร็วสูง วิธีนี้ประหยัดเนื่องจากมีความเป็นไปได้ในการถ่ายโอนพลังงานไฟฟ้าไปยังเครือข่าย
การเบรกสำรองอาจเกิดขึ้นได้สองกรณี:
1) หากแรงบิดภายนอกมากกว่าแรงบิดสตาร์ทของเครื่องยนต์ทำให้กระดองหมุนตามทิศทางการหมุนตามธรรมชาติ (ทำงานในจตุภาค IV)
2) หากขั้วของแรงดันไฟฟ้าบนกระดอง (หรือน้อยกว่าในขดลวดกระตุ้น) เปลี่ยนแปลงและกระดองยังคงหมุนไปในทิศทางเดียวกันตามความเฉื่อย
ต่อไปเราจะพิจารณากรณีที่สองที่พบบ่อยที่สุดโดยมีการเปลี่ยนแปลงขั้วของแรงดันไฟฟ้าที่กระดอง ในกรณีนี้กระดองปัจจุบัน I i = (-U i - E i)/ R i เปลี่ยนทิศทางและค่าของมันเพิ่มขึ้นอย่างรวดเร็วเพราะ ตอนนี้แรงดันและแรงเคลื่อนไฟฟ้าทำหน้าที่ไปในทิศทางเดียวกัน ดังนั้นเมื่อเบรกโดยการเชื่อมต่อแบบสวนทาง จำเป็นต้องมีความต้านทานเพิ่มเติม R d ในวงจรกระดอง การเปลี่ยนแปลงขั้วของแรงดันไฟฟ้าบนกระดองหมายความว่าสัญญาณของความเร็วในอุดมคติจะเปลี่ยนไปเช่นกัน ω o.id เช่น ลักษณะทางกลจะผ่านจตุภาคที่ 3 (รูปที่ 5.21, b) ในช่วงเวลาของการเปลี่ยนแรงดันไฟฟ้า เครื่องยนต์จะเคลื่อนที่จากจุด A ของลักษณะตามธรรมชาติของโหมดมอเตอร์ I ไปยังจุด B ของลักษณะการไหลคงที่ของโหมดเบรก 2 ช่วงเวลาที่ M em เปลี่ยนสัญญาณ และการลดลงอย่างเข้มข้นใน ω เริ่มต้นขึ้น ที่จุด C ความเร็วมอเตอร์จะเป็นศูนย์ และต้องตัดการเชื่อมต่อจากแหล่งจ่ายไฟ หากไม่ดำเนินการนี้ โรเตอร์จะเริ่มหมุนไปในทิศทางตรงกันข้าม และจะเข้าสู่สถานะคงที่ที่จุด D ของลิโน่หรือถ้าปิด R d ที่จุด D’ ของรีโอสแตตใหม่ ลักษณะทางธรรมชาติ 3 กล่าวคือ เครื่องยนต์จะถอยหลัง
การเบรกแบบไดนามิกทำได้โดยการถอดวงจรกระดองออกจากแหล่งกระแสตรง U และปิดไปที่ความต้านทานเพิ่มเติม R d ซึ่งมักเรียกว่าลิโน่เบรก (รูปที่ 5.22, a, สวิตช์เลื่อน K จากตำแหน่งซ้ายไปขวา)
ข้าว. 5.22
ในกรณีนี้ แรงดันไฟฟ้าที่ใช้กับกระดอง Ui = 0 กระแสกระดอง (ดู 5.39) I i = -E i / (R i + R d) จะเปลี่ยนทิศทาง และแรงบิดแม่เหล็กไฟฟ้า M em เกิดการเบรก พลังงานกลจลน์ที่เก็บไว้ในส่วนที่หมุนได้ของระบบขับเคลื่อนจะถูกแปลงเป็นพลังงานไฟฟ้า และเครื่องจะทำงานในโหมดเครื่องกำเนิดไฟฟ้า โดยส่งพลังงานไฟฟ้าไปยังความต้านทานการเบรก
สมการคุณลักษณะเชิงกล (5.37) ที่ Ui=0 อยู่ในรูปแบบ ω=-M em (R i +R d)/(kФ) 2 คุณลักษณะทางกลของโหมดการเบรกอยู่ในจตุภาค II ของระนาบ M em, ω (รูปที่ 5.22, b, R d2 >R d3)
ในขณะที่เปลี่ยน เครื่องยนต์จะเคลื่อนจากจุด A ของคุณลักษณะตามธรรมชาติของโหมดมอเตอร์ 1 ไปยังจุด B ของคุณลักษณะของโหมดเบรก 2 ช่วงเวลาที่ M em เปลี่ยนสัญญาณ และการเบรกแบบไดนามิกจะเริ่มขึ้น ความเร็วเชิงมุมลดลง แต่ในขณะเดียวกันแรงบิดในการเบรกก็ลดลงอย่างรวดเร็วเช่นกัน (เปลี่ยนจากจุด B เป็น C) เพื่อเพิ่มแรงบิดในการเบรก ความต้านทานเพิ่มเติม R d จะลดลง (การเปลี่ยนจากจุด C ไปยังจุด D) การเบรกเกิดขึ้นที่ความเร็วเป็นศูนย์
มอเตอร์แบบอนุกรมและการกระตุ้นแบบผสม
ในมอเตอร์แบบตื่นเต้นแบบอนุกรม (รูปที่ 5.23a) กระแสกระดองจะไหลผ่านขดลวดสนาม (I in = I i) และสิ่งนี้ส่งผลต่อคุณสมบัติหลักของมอเตอร์ในลักษณะหนึ่ง ในกรณีที่ไม่มีความอิ่มตัวของวงจรแม่เหล็กก็สามารถสันนิษฐานได้ว่า
F=K ฉ ฉัน (5.40)
โดยที่ K f คือสัมประสิทธิ์สัดส่วน
เมื่อคำนึงถึง (5.40) สมการ (5.10) และ (5.37) จะอยู่ในรูปแบบ
M em =KK ฉ ฉัน 2, (5.41)
ω = (U/ √(KK f M em)) -(R i +R ใน /KK f), (5.42)
โดยที่ R in คือความต้านทานของขดลวดกระตุ้น
ลักษณะทางกล (รูปที่ 5.23, b เส้นประ) มีความนุ่มนวล มีรูปร่างไฮเปอร์โบลิก และช่วยให้การทำงานของเครื่องยนต์มีความเสถียร ความนุ่มนวลของคุณลักษณะนี้อธิบายได้จากข้อเท็จจริงที่ว่าเมื่อแรงบิดโหลดเพิ่มขึ้นและความเร็วลดลงที่สอดคล้องกัน กระแสและฟลักซ์การกระตุ้นจะเพิ่มขึ้น ที่โหลดสูง ความอิ่มตัวของวงจรแม่เหล็กจะเริ่มส่งผลกระทบ และลักษณะจะแตกต่างจากที่คำนวณได้ (เส้นทึบ) มอเตอร์กระตุ้นตามลำดับไม่สามารถสตาร์ทได้หากไม่มีภาระบนเพลา เนื่องจากที่ M em → 0 ความเร็วเชิงมุม ω → ∞
การขึ้นต่อกันของแรงบิดกับกระแสกำลังสองทำให้สามารถรับแรงบิดสตาร์ทที่ใหญ่กว่าจากมอเตอร์แบบตื่นเต้นแบบอนุกรมด้วยกระแสสตาร์ทหลายหลากเท่ากัน ทำให้สามารถรับแรงบิดสตาร์ทที่ใหญ่กว่าจากมอเตอร์แบบอิสระหรือแบบตื่นเต้นแบบขนานได้
การสตาร์ท การถอยหลัง การเบรก และการควบคุมความเร็วเชิงมุมของมอเตอร์แบบตื่นเต้นแบบอนุกรมจะดำเนินการในลักษณะเดียวกับมอเตอร์แบบอิสระและแบบตื่นเต้นแบบขนาน โดยคำนึงถึงลักษณะเฉพาะของการเปิดขดลวด
รูปที่.5.23
มอเตอร์กระตุ้นแบบผสมมีลักษณะเฉพาะ ครอบครองตำแหน่งกลางระหว่างมอเตอร์กระตุ้นอิสระและมอเตอร์กระตุ้นตามลำดับ ลักษณะเฉพาะเฉพาะนั้นขึ้นอยู่กับว่าขดลวดกระตุ้นมีการเชื่อมต่อตามหรือทวนกระแส (ตามการไหล)
หลังจากโพสต์ก่อนหน้านี้เกี่ยวกับมอเตอร์เกียร์ ฉันได้รับคำถามหลายข้อเกี่ยวกับการควบคุมมอเตอร์กระแสตรง เลยมาเขียนกระทู้ใหม่ซะเลย :)
มอเตอร์กระแสตรง (มอเตอร์กระแสตรง) เป็นหนึ่งในมอเตอร์ไฟฟ้าที่คุ้นเคยและเข้าใจได้มากที่สุด มีการศึกษาแม้แต่ในโรงเรียนในวิชาฟิสิกส์ มีการใช้งานเกือบทุกที่ที่ต้องการมอเตอร์ขนาดเล็ก และไม่ต้องรีบร้อนที่จะสูญเสียตำแหน่ง แม้ว่าจะวัดกำลังเป็นสิบกิโลวัตต์ก็ตาม มาพูดถึงเขากันดีกว่า
▌
การออกแบบและหลักพื้นฐาน
ฉันจะไม่ลงรายละเอียดมากเกินไปที่นี่ ฉันจะแสดงรูปภาพจาก Wikipedia และระบุองค์ประกอบหลักจำนวนหนึ่ง ทุกสิ่งทุกอย่างที่คุณรู้และได้สัมผัสด้วยมือของคุณเอง
1. สเตเตอร์ประกอบด้วยแหล่งกำเนิด สนามแม่เหล็ก- นี่ไม่ใช่แม่เหล็กถาวรเสมอไป ยิ่งกว่านั้น แม่เหล็กถาวรก็เป็นข้อยกเว้นมากกว่ากฎ โดยปกติแล้วนี่คือขดลวดกระตุ้น อย่างน้อยก็ในสิ่งใดก็ตามที่ใหญ่กว่ากำปั้น
2. กระดองประกอบด้วยขดลวดกระดองและหน่วยสะสม
ทุกอย่างทำงานได้ง่ายมาก ขดลวดกระดองถูกผลักออกจากสนามแม่เหล็กของสเตเตอร์ด้วยแรงแอมแปร์และทำการปฏิวัติครึ่งหนึ่งโดยพยายามทำให้แรงนี้เป็นศูนย์และคงจะนำมันออกมาถ้าไม่ใช่เพราะนักสะสมซึ่งแยกทุกคนออกอย่างชาญฉลาดเปลี่ยนขั้ว ของขดลวดและแรงกลับกลายเป็นสูงสุดอีกครั้ง และเป็นวงกลมต่อไป เหล่านั้น. ตัวสะสมทำหน้าที่เป็นอินเวอร์เตอร์แรงดันไฟฟ้าทางกลในกระดอง จำช่วงเวลานี้ไว้ มันจะเป็นประโยชน์สำหรับเราในภายหลัง :)
โดยปกติแล้วในมอเตอร์ขนาดเล็กจะมีขดลวดสนามเพียงสองขั้ว (หนึ่งคู่) และกระดองสามขา ฟันเฟืองขั้นต่ำจำนวน 3 ซี่สำหรับการสตาร์ทจากตำแหน่งใดๆ แต่ยิ่งมีฟันมากก็ยิ่งใช้ขดลวดได้อย่างมีประสิทธิภาพมากขึ้น กระแสไฟฟ้าน้อยลง และแรงบิดที่นุ่มนวลขึ้น เนื่องจากแรงจะฉายไปที่มุม และส่วนที่ทำงานอยู่ของขดลวดจะหมุนไปที่ มุมที่เล็กกว่า
▌
กระบวนการต่างๆ ที่เกิดขึ้นในเครื่องยนต์
ฉันคิดว่าหลายท่านที่เคยขลุกอยู่กับเครื่องยนต์อาจสังเกตเห็นว่าพวกเขามีกระแสสตาร์ทที่เด่นชัด เมื่อมอเตอร์ที่จุดเริ่มต้นสามารถกระตุกเข็มของแอมป์มิเตอร์ได้ เช่น เป็นแอมแปร์ และหลังจากการเร่งความเร็ว กระแสไฟฟ้าจะลดลงเหลือประมาณ 200 mA .
ทำไมสิ่งนี้ถึงเกิดขึ้น? นี่คือวิธีการทำงานของ back emf เมื่อเครื่องยนต์ดับ กระแสที่สามารถไหลผ่านได้นั้นขึ้นอยู่กับพารามิเตอร์สองตัวเท่านั้น - แรงดันไฟฟ้าและความต้านทานของขดลวดกระดอง ดังนั้นจึงเป็นเรื่องง่ายที่จะค้นหากระแสสูงสุดที่เครื่องยนต์สามารถพัฒนาได้และควรคำนวณวงจรใด ก็เพียงพอที่จะวัดความต้านทานของขดลวดมอเตอร์และแบ่งแรงดันไฟฟ้าตามค่านี้ เพียงตามกฎของโอห์ม นี่จะเป็นกระแสเริ่มต้นสูงสุด
แต่เมื่อมันเร่งความเร็ว สิ่งที่ตลกก็เริ่มต้นขึ้น: ขดลวดกระดองเคลื่อนที่ผ่านสนามแม่เหล็กของสเตเตอร์ และเกิด EMF ในนั้น เช่นเดียวกับในเครื่องกำเนิดไฟฟ้า แต่มันจะหันไปตรงข้ามกับที่หมุนเครื่องยนต์ และเป็นผลให้กระแสผ่านกระดองลดลงอย่างรวดเร็ว ยิ่งความเร็วยิ่งสูงขึ้น
และถ้าเครื่องยนต์ถูกขันให้แน่นต่อไปอีก แรงเคลื่อนไฟฟ้าด้านหลังจะสูงกว่ากำลังจ่าย และเครื่องยนต์จะเริ่มสูบพลังงานเข้าสู่ระบบกลายเป็นเครื่องกำเนิดไฟฟ้า
▌
ไม่กี่สูตร
ฉันจะไม่สร้างภาระให้ใครในการสรุป คุณจะพบพวกเขาเองถ้าคุณต้องการ เพื่อให้ดูหมิ่นน้อยลง ฉันขอแนะนำให้หาหนังสือเรียนเกี่ยวกับไดรฟ์ไฟฟ้าสำหรับโรงเรียนมัธยมศึกษาและสิ่งพิมพ์ที่เก่ากว่านั้น เป็นภาพจากยุค 50-60 :) มีภาพวินเทจและภาพวาดสำหรับการสำเร็จการศึกษาจากโรงเรียนเจ็ดปีในชนบทเมื่อวานนี้ ตัวอักษรเยอะ ไม่มีจม ทุกอย่างชัดเจนและตรงประเด็น
สูตรที่สำคัญที่สุดสำหรับมอเตอร์กระแสตรงแบบมีแปรงถ่านคือ:
U = E + ฉัน ฉัน *R ฉัน
- U - แรงดันไฟฟ้าที่จ่ายให้กับกระดอง
- R i คือความต้านทานของโซ่สมอ โดยปกติสัญลักษณ์นี้ถือเป็นเฉพาะความต้านทานของขดลวดแม้ว่าคุณจะสามารถแขวนตัวต้านทานไว้ด้านนอกได้และจะถูกเพิ่มเข้าไป จากนั้นพวกเขาก็เขียนมันเป็น (R i + R d)
- ผม ผม คือกระแสในวงจรกระดอง อันเดียวกับที่วัดด้วยแอมป์มิเตอร์เมื่อพยายามวัดปริมาณการใช้เครื่องยนต์ :)
- E คือแรงเคลื่อนไฟฟ้าด้านหลังหรือแรงเคลื่อนไฟฟ้าของเครื่องกำเนิดไฟฟ้าในโหมดเครื่องกำเนิดไฟฟ้า ขึ้นอยู่กับการออกแบบเครื่องยนต์ ความเร็ว และอธิบายได้ด้วยสูตรง่ายๆ นี้
E = C อี * F * n
- C e เป็นหนึ่งในค่าคงที่การออกแบบ ขึ้นอยู่กับการออกแบบของมอเตอร์ จำนวนขั้ว จำนวนรอบ และความหนาของช่องว่างระหว่างกระดองและสเตเตอร์ เราไม่ต้องการมันจริงๆ หากต้องการ คุณสามารถคำนวณได้โดยการทดลอง สิ่งสำคัญคือมีความคงที่และไม่ส่งผลต่อรูปร่างของเส้นโค้ง :)
- F คือฟลักซ์การกระตุ้น เหล่านั้น. ความแรงของสนามแม่เหล็กสเตเตอร์ ในมอเตอร์ขนาดเล็กซึ่งถูกกำหนดโดยแม่เหล็กถาวร ค่านี้จะมีค่าคงที่เช่นกัน แต่บางครั้งมีการนำขดลวดแยกออกมาเพื่อกระตุ้น แล้วเราก็สามารถเปลี่ยนได้
- n - การปฏิวัติกระดอง
การขึ้นอยู่กับแรงบิดกับกระแสและการไหล:
M = C ม. * ฉัน ฉัน * F
C m เป็นค่าคงที่เชิงสร้างสรรค์
เป็นที่น่าสังเกตว่าการพึ่งพาแรงบิดกับกระแสไฟฟ้านั้นตรงอย่างสมบูรณ์ เหล่านั้น. เพียงการวัดกระแสที่มีกระแสกระตุ้นคงที่ เราก็สามารถกำหนดขนาดของแรงบิดได้อย่างแม่นยำ สิ่งนี้อาจมีความสำคัญ เช่น เพื่อไม่ให้ระบบขับเคลื่อนเสียหาย เมื่อเครื่องยนต์สามารถพัฒนาแรงจนสามารถทำลายสิ่งที่หมุนอยู่ตรงนั้นได้อย่างง่ายดาย โดยเฉพาะกับกระปุกเกียร์
จากนี้ไปแรงบิดของเครื่อง DC ขึ้นอยู่กับความสามารถของแหล่งกำเนิดในการจ่ายกระแสไฟฟ้าเท่านั้น ดังนั้นเครื่องยนต์ตัวนำยิ่งยวดที่ทำลายไม่ได้ในอุดมคติจะผูกมัดคุณเป็นปม แม้ว่าจะมีขนาดเล็กเท่าตะปูก็ตาม เพียงจัดหาพลังงาน
ทีนี้มาผสมทั้งหมดเข้าด้วยกันแล้วรับการหมุนของแรงบิดซึ่งเป็นลักษณะทางกลของเครื่องยนต์

หากคุณสร้างมันขึ้นมามันจะเป็นดังนี้:
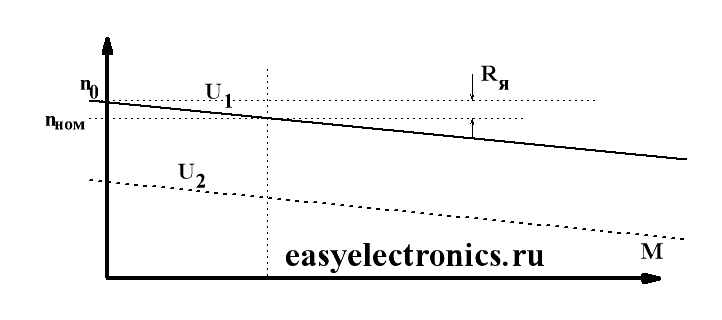
n 0 คือความเร็วรอบเดินเบาในอุดมคติของเครื่องยนต์ทรงกลมในสุญญากาศ เหล่านั้น. เมื่อเครื่องยนต์ของเราหยุดนิ่งในที่สุด แรงบิดก็จะเป็นศูนย์ การบริโภคในปัจจุบันก็เป็นศูนย์เช่นกัน เพราะ แรงเคลื่อนไฟฟ้าด้านหลังเท่ากับแรงดันไฟฟ้า ตัวเลือกทางทฤษฎีล้วนๆ และจุดที่สองจะถูกสร้างขึ้นโดยมีช่วงเวลาหนึ่งอยู่บนเพลา ปรากฎว่ามีความสัมพันธ์โดยตรงระหว่างความเร็วและแรงบิด และความชันของลักษณะถูกกำหนดโดยความต้านทานของโซ่กระดอง หากไม่มีตัวต้านทานเพิ่มเติม เรียกว่าลักษณะตามธรรมชาติ
ความเร็วรอบเดินเบาในอุดมคติขึ้นอยู่กับแรงดันและการไหล ไม่มีอะไรอื่น และถ้าฟลักซ์คงที่ (แม่เหล็กถาวร) ก็แสดงว่ามาจากแรงดันไฟฟ้าเท่านั้น ด้วยการลดแรงดันไฟฟ้า คุณลักษณะทั้งหมดของเราจึงเลื่อนลงแบบขนาน ลดแรงดันไฟฟ้าลงครึ่งหนึ่ง - ความเร็วลดลงครึ่งหนึ่ง
หากเป็นไปได้ที่จะเปลี่ยนกระแสการกระตุ้นคุณสามารถเพิ่มความเร็วให้สูงกว่าค่าที่กำหนดได้ ที่นี่ความสัมพันธ์จะกลับกัน เราทำให้การไหลลดลง - เครื่องยนต์เร่งความเร็ว แต่แรงบิดลดลงหรือจำเป็นต้องใช้กระแสไฟฟ้ามากขึ้น
เครื่องยนต์อื่นที่เอาแรงกระตุ้นออกอาจเกิดความระส่ำระสาย ฉันจำได้ว่าฉันเดินทางไกลด้วยการขับขี่แบบไฟฟ้า ใครจะรู้ว่าหลังจากเซสชั่นนี้ใช้เวลานานเท่าใด ฉันต้องพังมันแน่ :) ฉันนั่งอยู่ในห้องทดลองเพื่อรออาจารย์ และมีบางคนที่ต่ำกว่านั้นกำลังสร้างห้องแล็บ พวกเขาหมุนรอบเดินเบาของเครื่องยนต์และมีการกระตุ้นติดอยู่กับขาตั้งบนน้ำมูกและบินออกจากเทอร์มินัล เครื่องยนต์เกิดปัญหา ในห้องปฏิบัติการของเราที่ EPA SUSU ทุกอย่างจริงจัง เครื่องจักรแต่ละเครื่องมีน้ำหนักสิบกิโลวัตต์และประมาณหนึ่งร้อยกิโลกรัมโดยประมาณ ทุกอย่างใช้แรงดันไฟฟ้ารุนแรงที่ 380 โวลต์
โดยทั่วไปแล้ว เมื่อคนโง่คนนี้คำรามเหมือนสัตว์ประหลาดและเริ่มฉีกตัวออกจากพาหนะ สิ่งเดียวที่ฉันตะโกนได้คือลงนรกออกจากรถ ทำให้มันลงนรก ก่อนที่เราจะมีเวลา เครื่องยนต์ขาดจากที่ยึด ขดลวดหลุดออกจากร่อง และเครื่องยนต์ได้รับความเสียหาย โอเค ไม่มีใครได้รับบาดเจ็บ
อย่างไรก็ตาม ห้องทดลองไดรฟ์ยังคงเป็นความบันเทิง เรามีไฟและการระเบิดที่นั่น ที่นั่นฉันได้รับทักษะอันน่าทึ่งในการแก้ไขสิ่งใดสิ่งหนึ่งด้วยสิ่งใดสิ่งหนึ่งในเวลาอันสั้น โดยเฉลี่ยแล้ว ทุกคนสามารถฆ่าขาตั้งนั้นจนหมดได้เพียงครั้งเดียว และห้องปฏิบัติการมักจะเริ่มต้นด้วยการซ่อมแซมหัวแร้งซึ่งใช้ในการซ่อมแซมออสซิลโลสโคป ด้วยความช่วยเหลือที่ทำให้ขาตั้งที่ตายแล้วได้รับการฟื้นฟู
การเพิ่มตัวต้านทานให้กับวงจรกระดองทำให้เราสามารถเพิ่มความชันได้ เช่น ยิ่งเราโหลดมากความเร็วก็ยิ่งลดลง 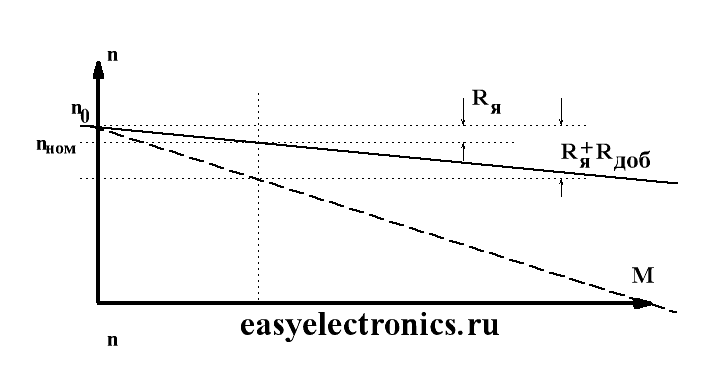
วิธีการนี้ไม่ดีเนื่องจากตัวต้านทานในวงจรกระดองต้องได้รับการจัดอันดับสำหรับกระแสของมอเตอร์ เช่น มีกำลังมากและจะร้อนขึ้นอย่างเปล่าประโยชน์ ช่วงเวลานั้นลดลงอย่างรวดเร็วซึ่งไม่ดี
นอกจากนี้ยังมีมอเตอร์ที่มีลำดับมากกว่าการกระตุ้นแบบอิสระ นี่คือเมื่อขดลวดสเตเตอร์เชื่อมต่อแบบอนุกรมกับกระดอง ไม่ใช่ว่ามอเตอร์ทุกตัวจะสามารถหมุนได้ด้วยวิธีนี้ สนามที่คดเคี้ยวจะต้องทนต่อกระแสกระดอง แต่พวกเขามีคุณสมบัติที่น่าสนใจอย่างหนึ่ง เมื่อสตาร์ท กระแสสตาร์ทขนาดใหญ่จะเกิดขึ้น และกระแสสตาร์ทนี้ก็เป็นกระแสกระตุ้นด้วย ซึ่งให้แรงบิดสตาร์ทมหาศาล ลักษณะทางกลมีลักษณะคล้ายไฮเปอร์โบลาซึ่งมีค่าสูงสุดอยู่ในขอบเขตของการปฏิวัติเป็นศูนย์
จากนั้นเมื่อคุณเร่งความเร็ว แรงบิดจะลดลง และในทางกลับกัน ความเร็วจะเพิ่มขึ้น และถ้าโหลดออกจากเพลา เครื่องยนต์จะเข้าสู่โอเวอร์ไดรฟ์ทันที เครื่องยนต์ดังกล่าวส่วนใหญ่จะติดตั้งบนดราฟท์ไดรฟ์ อย่างน้อยพวกเขาก็เคยทำมาก่อน ก่อนที่จะมีการพัฒนาอุปกรณ์อิเล็กทรอนิกส์กำลัง อึนี้ระเบิดออกจากตำแหน่งมากจนนักฆ่าบนท้องถนนทุกคนลุกเป็นไฟอย่างประหม่า
▌
โหมดการทำงานของมอเตอร์กระแสตรง
ทิศทางการหมุนของมอเตอร์ขึ้นอยู่กับทิศทางของกระแสกระดองหรือทิศทางการไหลของการกระตุ้น ดังนั้นถ้าคุณเอา มอเตอร์แปรงและเชื่อมต่อขดลวดกระตุ้นขนานกับกระดองจากนั้นจะหมุนได้อย่างสมบูรณ์แบบบนกระแสสลับ (มอเตอร์สากลมักติดตั้งในเครื่องใช้ในครัว) เพราะ กระแสจะเปลี่ยนแปลงไปพร้อมกันทั้งในส่วนของกระดองและการกระตุ้น ช่วงเวลานั้นจะต้องเร้าใจอย่างแน่นอน แต่สิ่งเหล่านี้ก็เป็นเรื่องเล็ก ๆ น้อย ๆ และหากต้องการย้อนกลับคุณจะต้องเปลี่ยนขั้วของกระดองหรือการกระตุ้น
หากเราวาดคุณลักษณะทางกลในสี่จตุภาค เราจะได้สิ่งที่คล้ายกับสิ่งนี้:
ตัวอย่างเช่น ลักษณะที่ 1 ในส่วนที่ 1 รถของเราทำงานเหมือนเครื่องยนต์ โหลดจะเพิ่มขึ้นและในช่วงเวลาหนึ่งเครื่องยนต์ก็หยุดและเริ่มหมุน ด้านหลัง, เช่น. โหลดจะกลับด้าน นี่คือโหมดเบรกป้องกันการยับยั้ง โหมดนี้ยากมากเครื่องยนต์ร้อนจัดอย่างไร้ความปราณี แต่เบรกได้อย่างมีประสิทธิภาพมาก หากโมเมนต์บนเพลาเปลี่ยนทิศทางและเริ่มหมุนเข้าหาเครื่องยนต์ มอเตอร์จะเข้าสู่เจนเนอเรชั่นทันที (ส่วนที่ 4)
คุณลักษณะที่ 2 เหมือนกัน เฉพาะกับขั้วย้อนกลับของแรงดันไฟฟ้าของมอเตอร์เท่านั้น
และลักษณะที่ 3 คือการเบรกแบบไดนามิก มันคือรีโอสแตท เหล่านั้น. เมื่อเราลัดวงจรมอเตอร์ของเราไปที่ตัวต้านทานหรือต่อตัวมันเอง คุณสามารถตรวจสอบได้ด้วยตัวเอง นำมอเตอร์ตัวใดก็ได้มาหมุน จากนั้นลัดวงจรเกราะแล้วหมุนอีกครั้ง จะมีแรงกดที่เพลาอย่างเห็นได้ชัดทำให้คุณภาพของเครื่องยนต์ดีขึ้น
อย่างไรก็ตาม ไดรเวอร์มอเตอร์เช่น L293 หรือ L297 มีความสามารถในการเปิดการเบรกแบบรีโอสแตติกโดยการหมุนปุ่มทั้งสองขึ้นหรือลง ในกรณีนี้ เกราะจะลัดวงจรผ่านตัวขับไปที่กราวด์หรือพาวเวอร์บัส
▌
มอเตอร์กระแสตรงไร้แปรงถ่าน
เครื่องยนต์สะสมดีมาก มันง่ายและยืดหยุ่นในการปรับเปลี่ยน คุณสามารถเพิ่มความเร็ว ลดความเร็วลงได้ ลักษณะทางกลนั้นแข็งแกร่ง รักษาแรงบิดได้อย่างดีเยี่ยม การพึ่งพาอาศัยกันโดยตรง มันเป็นเทพนิยายไม่ใช่มอเตอร์ ถ้าไม่ใช่เพราะความอร่อยนี้สักช้อนเดียว - นักสะสม
นี่เป็นหน่วยที่ซับซ้อน มีราคาแพง และไม่น่าเชื่อถือมาก มันเกิดประกายไฟ ทำให้เกิดการรบกวน และอุดตันด้วยฝุ่นที่เป็นสื่อกระแสไฟฟ้าจากแปรง และภายใต้ภาระหนักก็สามารถลุกเป็นไฟก่อตัวเป็นไฟวงกลมแล้วเครื่องยนต์ก็ถูกขัน มันจะลัดวงจรทุกอย่างอย่างแน่นหนา
แต่นักสะสมคืออะไรล่ะ? ทำไมเขาถึงจำเป็น? ข้างต้นผมบอกว่าตัวสะสมเป็นอินเวอร์เตอร์แบบกลไก หน้าที่ของมันคือการเปลี่ยนแรงดันกระดองไปมาเพื่อให้ขดลวดสัมผัสกับกระแส
แต่ถึงศตวรรษที่ 21 แล้ว เซมิคอนดักเตอร์ราคาถูกและทรงพลังก็มีอยู่ทุกหนทุกแห่ง แล้วทำไมเราถึงต้องใช้อินเวอร์เตอร์เชิงกลถ้าเราสามารถทำให้มันเป็นอิเล็กทรอนิกส์ได้? ถูกต้อง ไม่จำเป็น! ดังนั้นเราจึงนำสวิตช์ไฟมาแทนที่ตัวสะสมและเพิ่มเซ็นเซอร์ตำแหน่งโรเตอร์เพื่อให้เราทราบว่าควรเปลี่ยนขดลวดเมื่อใด
และเพื่อความสะดวกยิ่งขึ้น เรากลับเครื่องยนต์กลับด้านใน - การหมุนแม่เหล็กหรือขดลวดกระตุ้นธรรมดานั้นง่ายกว่าการใส่กระดองที่มีขยะทั้งหมดนี้อยู่บนเรือ โรเตอร์ที่นี่อาจเป็นแม่เหล็กถาวรอันทรงพลังหรือขดลวดที่ขับเคลื่อนด้วยวงแหวนสลิป ซึ่งแม้จะดูเหมือนนักสะสม แต่ก็มีความน่าเชื่อถือมากกว่ามาก
แล้วเราได้อะไร? ขวา! มอเตอร์กระแสตรงไร้แปรงถ่านหรือที่รู้จักกันในชื่อ BLDC ลักษณะที่น่ารักและความสะดวกสบายแบบเดียวกันทั้งหมดของ DPT แต่ไม่มีตัวสะสมที่น่ารังเกียจนี้ และอย่าสับสน BLDC กับมอเตอร์ซิงโครนัส นี่คือสมบูรณ์ รถยนต์ที่แตกต่างกันและหลักการทำงานและการควบคุมที่แตกต่างกัน แม้ว่าโครงสร้างจะคล้ายกันมากและซิงโครไนเซอร์เดียวกันก็สามารถทำงานเป็น BLDC ได้อย่างง่ายดาย แต่เพิ่มเพียงเซ็นเซอร์และระบบควบคุมเข้าไป แต่นั่นเป็นเรื่องราวที่แตกต่างไปจากเดิมอย่างสิ้นเชิง
มอเตอร์กระแสตรงขึ้นอยู่กับวิธีการกระตุ้นตามที่ระบุไว้แล้วแบ่งออกเป็นมอเตอร์ ด้วยความเป็นอิสระ, ขนาน(แบ่ง) สม่ำเสมอ(อนุกรม) และการกระตุ้นแบบผสม (ผสม)
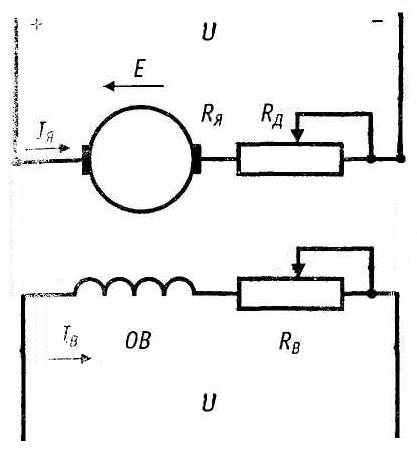
มอเตอร์ที่ตื่นเต้นอย่างอิสระต้องใช้แหล่งพลังงานสองแหล่ง (รูปที่ 11.9, ก) หนึ่งในนั้นจำเป็นต้องจ่ายไฟให้กับขดลวดกระดอง (ข้อสรุป ยา1และ ยา2) และอื่น ๆ - เพื่อสร้างกระแสในขดลวดกระตุ้น (ขั้วขดลวด Ш1และ Ш2- ความต้านทานเพิ่มเติม ถในวงจรขดลวดกระดองจำเป็นต้องลดกระแสสตาร์ทของมอเตอร์ในขณะที่เปิดเครื่อง
มอเตอร์ไฟฟ้ากำลังแรงส่วนใหญ่ผลิตขึ้นโดยมีการกระตุ้นแบบอิสระเพื่อการควบคุมกระแสกระตุ้นที่สะดวกและประหยัดยิ่งขึ้น หน้าตัดของลวดขดลวดสนามจะขึ้นอยู่กับแรงดันไฟฟ้าของแหล่งพลังงาน คุณลักษณะของเครื่องเหล่านี้คือความเป็นอิสระของกระแสกระตุ้นและตามฟลักซ์แม่เหล็กหลักจากโหลดบนเพลามอเตอร์
มอเตอร์ที่มีการกระตุ้นแบบอิสระมีลักษณะเกือบเหมือนกันกับมอเตอร์ที่กระตุ้นแบบขนาน
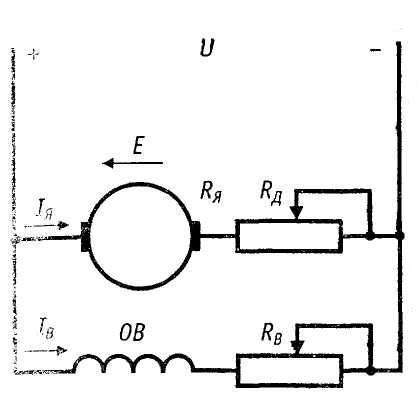
มอเตอร์แบบขนานเปิดสวิตช์ตามวงจรที่แสดงในรูปที่ 11.9, b. ที่หนีบ ยา1และ ยา2เกี่ยวข้องกับขดลวดกระดองและที่หนีบ Ш1และ Ш2- ถึงขดลวดกระตุ้น (ถึงขดลวดปัด) ตัวแปรต้านทาน ถและ รฟได้รับการออกแบบตามลำดับเพื่อเปลี่ยนกระแสในขดลวดกระดองและในขดลวดสนาม ขดลวดสนามของมอเตอร์นี้ทำจากลวดทองแดงจำนวนมากที่มีหน้าตัดค่อนข้างเล็กและมีความต้านทานที่สำคัญ ซึ่งช่วยให้คุณสามารถเชื่อมต่อกับแรงดันไฟฟ้าเครือข่ายทั้งหมดที่ระบุในข้อมูลหนังสือเดินทาง
คุณสมบัติของเครื่องยนต์ประเภทนี้คือในระหว่างการใช้งานห้ามถอดขดลวดสนามออกจากวงจรกระดอง มิฉะนั้นเมื่อสนามคดเคี้ยวเปิดขึ้น ค่า EMF ที่ยอมรับไม่ได้จะปรากฏขึ้นซึ่งอาจส่งผลให้เครื่องยนต์ขัดข้องและบาดเจ็บต่อเจ้าหน้าที่ซ่อมบำรุงได้ ด้วยเหตุผลเดียวกัน ไม่สามารถเปิดการม้วนสนามได้เมื่อดับเครื่องยนต์ในขณะที่ยังไม่หยุดการหมุน
เมื่อความเร็วในการหมุนเพิ่มขึ้น ความต้านทาน Rd เพิ่มเติม (เพิ่มเติม) ในวงจรกระดองควรลดลง และเมื่อถึงความเร็วการหมุนคงที่ ควรถอดออกจนหมด
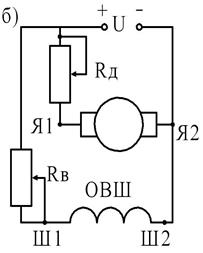
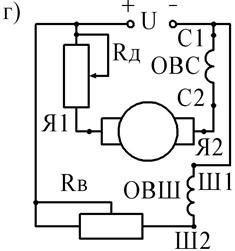
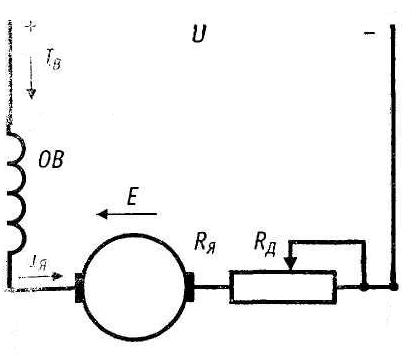
มะเดื่อ 11.9. ประเภทของการกระตุ้นของเครื่อง DC
ก - การกระตุ้นแบบอิสระ b - การกระตุ้นแบบขนาน
c - การกระตุ้นตามลำดับ d - การกระตุ้นแบบผสม
OVSh - ขดลวดกระตุ้นแบบแบ่ง, OVS - ขดลวดกระตุ้นแบบอนุกรม, OVN - ขดลวดกระตุ้นอิสระ, Rd - ความต้านทานเพิ่มเติมในวงจรขดลวดกระดอง, Rv - ความต้านทานเพิ่มเติมในวงจรขดลวดกระตุ้น
การไม่มีความต้านทานเพิ่มเติมในขดลวดกระดองในขณะที่สตาร์ทเครื่องยนต์อาจทำให้เกิดกระแสไฟฟ้าสตาร์ทขนาดใหญ่เกินกระแสกระดองที่ได้รับการจัดอันดับใน 10...40 ครั้ง .
คุณสมบัติที่สำคัญของมอเตอร์กระตุ้นแบบขนานคือความเร็วในการหมุนเกือบคงที่เมื่อโหลดบนเพลากระดองเปลี่ยนไป ดังนั้นเมื่อโหลดเปลี่ยนจากรอบเดินเบาเป็นค่าที่กำหนด ความเร็วในการหมุนจะลดลงเท่านั้น (2.. 8)% .
คุณสมบัติที่สองของเครื่องยนต์เหล่านี้คือการควบคุมความเร็วที่ประหยัดซึ่งสามารถกำหนดอัตราส่วนของความเร็วสูงสุดต่อความเร็วต่ำสุดได้ 2:1 และด้วยการออกแบบเครื่องยนต์แบบพิเศษ - 6:1 - ความเร็วในการหมุนขั้นต่ำถูกจำกัดด้วยความอิ่มตัวของวงจรแม่เหล็กซึ่งไม่อนุญาตให้เพิ่มฟลักซ์แม่เหล็กของเครื่องและขีดจำกัดบนของความเร็วในการหมุนจะถูกกำหนดโดยความเสถียรของเครื่อง - หากฟลักซ์แม่เหล็กอ่อนลงอย่างมาก , เครื่องยนต์สามารถ “ดับได้”
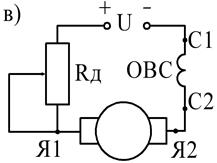
มอเตอร์ซีรีย์(อนุกรม) ถูกเปิดตามแผนภาพ (รูปที่ 11.9, c) ข้อสรุป ค1และ ค2สอดคล้องกับขดลวดกระตุ้นแบบอนุกรม (ตามลำดับ) ทำจากลวดทองแดงหน้าตัดขนาดใหญ่เป็นจำนวนรอบค่อนข้างน้อย ขดลวดสนามมีการเชื่อมต่อแบบอนุกรมกับขดลวดกระดอง- ความต้านทานเพิ่มเติม ถในวงจรขดลวดกระดองและแรงกระตุ้นช่วยให้คุณสามารถลดกระแสสตาร์ทและควบคุมความเร็วของเครื่องยนต์ได้ ในขณะที่เครื่องยนต์เปิดอยู่จะต้องมีค่าที่กระแสไฟเริ่มต้นจะเป็น (1.5...2.5)เข้า- หลังจากที่เครื่องยนต์ถึงความเร็วคงที่แล้ว ให้เพิ่มแรงต้านทาน ถคือเอาต์พุต นั่นคือ ตั้งค่าเท่ากับศูนย์
มอเตอร์เหล่านี้พัฒนาแรงบิดในการสตาร์ทที่สูงเมื่อสตาร์ท และต้องสตาร์ทที่โหลดอย่างน้อย 25% ของค่าพิกัด ไม่อนุญาตให้สตาร์ทเครื่องยนต์โดยใช้กำลังที่น้อยกว่าบนเพลา และโดยเฉพาะอย่างยิ่งในโหมดเดินเบาไม่ได้รับอนุญาต มิฉะนั้น เครื่องยนต์อาจมีความเร็วสูงจนไม่อาจยอมรับได้ ซึ่งจะทำให้เครื่องยนต์ขัดข้องได้ มอเตอร์ประเภทนี้มีการใช้กันอย่างแพร่หลายในกลไกการขนส่งและการยกซึ่งจำเป็นต้องเปลี่ยนความเร็วในการหมุนในช่วงกว้าง
มอเตอร์กระตุ้นแบบผสม(สารประกอบ) ครอบครองตำแหน่งกลางระหว่างมอเตอร์กระตุ้นแบบขนานและแบบอนุกรม (รูปที่ 11.9, d) ไม่ว่าจะเป็นประเภทใดประเภทหนึ่งขึ้นอยู่กับอัตราส่วนของส่วนต่าง ๆ ของกระแสกระตุ้นหลักที่สร้างขึ้นโดยขดลวดกระตุ้นแบบขนานหรือแบบอนุกรม เมื่อเครื่องยนต์เปิดอยู่ เพื่อลดกระแสสตาร์ท ความต้านทานเพิ่มเติมจะรวมอยู่ในวงจรขดลวดกระดอง ถ- เครื่องยนต์นี้มีคุณสมบัติการยึดเกาะที่ดีและเดินเบาได้
อนุญาตให้เปิดสวิตช์มอเตอร์กระแสตรงโดยตรง (ไม่มีความต้านทาน) ของการกระตุ้นทุกประเภทด้วยกำลังไม่เกินหนึ่งกิโลวัตต์
การกำหนดเครื่อง DC
ปัจจุบันเครื่อง DC เอนกประสงค์ที่ใช้กันอย่างแพร่หลายที่สุดคือ 2พีและซีรีย์ใหม่ล่าสุด 4ป.นอกเหนือจากซีรีส์เหล่านี้แล้ว ยังมีการผลิตเครื่องยนต์สำหรับเครน รถขุด ระบบขับเคลื่อนโลหะ และตัวขับเคลื่อนอื่นๆ ในซีรีส์นี้ ดี.เครื่องยนต์ยังผลิตขึ้นในซีรีย์พิเศษอีกด้วย
เครื่องยนต์ซีรีส์ 2พีและ 4ปจะถูกแบ่งตามแกนของการหมุน ตามธรรมเนียมสำหรับมอเตอร์ AC แบบอะซิงโครนัสในซีรีส์ 4เอ- ซีรีส์เครื่องจักร 2พีมี 11 มิติซึ่งมีความสูงของการหมุนแกนต่างกันตั้งแต่ 90 ถึง 315 มม. ช่วงกำลังของเครื่องจักรในซีรีส์นี้คือตั้งแต่ 0.13 ถึง 200 kW สำหรับมอเตอร์ไฟฟ้า และตั้งแต่ 0.37 ถึง 180 kW สำหรับเครื่องกำเนิดไฟฟ้า มอเตอร์ของซีรีย์ 2P และ 4P ได้รับการออกแบบมาสำหรับแรงดันไฟฟ้า 110, 220, 340 และ 440 V ความเร็วในการหมุนที่กำหนดคือ 750, 1,000, 1500, 2200 และ 3000 รอบต่อนาที
ขนาดรถแต่ละรุ่นจากทั้งหมด 11 ขนาดในซีรีส์ 2พีมีเตียงยาวสองเตียง (เอ็ม และ แอล).
ซีรีส์เครื่องจักรไฟฟ้า 4ปมีตัวชี้วัดทางเทคนิคและเศรษฐกิจที่ดีกว่าเมื่อเทียบกับซีรีส์นี้ 2พี- ความซับซ้อนของการผลิตซีรีส์ 4ปเปรียบเทียบกับ 2พีลดลง 2.5...3 เท่า ในขณะเดียวกัน การใช้ทองแดงก็ลดลง 25...30% สำหรับคุณสมบัติการออกแบบหลายประการ รวมถึงวิธีการทำความเย็น การป้องกันสภาพอากาศ และการใช้ชิ้นส่วนและส่วนประกอบแต่ละชิ้นของเครื่องซีรีส์ 4ปรวมเป็นหนึ่งเดียวกับมอเตอร์แบบอะซิงโครนัสของซีรีส์ 4เอและ AI .
การกำหนดเครื่อง DC (ทั้งเครื่องกำเนิดไฟฟ้าและมอเตอร์) มีดังต่อไปนี้:
Пх1х2хЗх4,
ที่ไหน 2พี- ชุดเครื่อง DC;
จิน- การออกแบบตามประเภทของการป้องกัน: N - ป้องกันด้วยการระบายอากาศในตัวเอง, F - ป้องกันด้วยการระบายอากาศที่เป็นอิสระ, B - ปิดด้วยการระบายความร้อนตามธรรมชาติ, O - ปิดด้วยการเป่าจากพัดลมภายนอก;
X2- ความสูงของแกนหมุน (ตัวเลขสองหลักหรือสามหลัก) เป็นมม.
เฮิรตซ์- ความยาวสเตเตอร์ทั่วไป: M - อันดับแรก, L - วินาที, G - พร้อมเครื่องกำเนิดไฟฟ้าเร็ว;
ตัวอย่างคือการกำหนดเครื่องยนต์ 2PN112MGU- ซีรีย์มอเตอร์กระแสตรง 2พี, รุ่นป้องกันที่มีการระบายอากาศในตัว เอ็น,112 ความสูงของแกนหมุนเป็นมม. ขนาดสเตเตอร์แรก ม, พร้อมด้วยเครื่องกำเนิดไฟฟ้าแบบทาโคเจนเนอเรเตอร์ ชใช้สำหรับสภาพอากาศที่อบอุ่น คุณ.
เครื่องจักรไฟฟ้ากระแสตรงสามารถแบ่งตามกำลังได้ดังต่อไปนี้:
ไมโครแมชชีน………………...น้อยกว่า 100 W
เครื่องจักรขนาดเล็ก………………จาก 100 ถึง 1,000 W
เครื่องจักรพลังงานต่ำ…………..ตั้งแต่ 1 ถึง 10 kW
เครื่องจักรกำลังปานกลาง……..ตั้งแต่ 10 ถึง 100 kW
เครื่องจักรขนาดใหญ่……………………..ตั้งแต่ 100 ถึง 1,000 kW
เครื่องจักรกำลังสูง…….มากกว่า 1,000 kW
ตามแรงดันไฟฟ้าที่กำหนดเครื่องใช้ไฟฟ้าจะถูกแบ่งตามอัตภาพดังนี้:
แรงดันไฟฟ้าต่ำ…….น้อยกว่า 100 V
แรงดันไฟฟ้าปานกลาง………….จาก 100 ถึง 1,000 V,
ไฟฟ้าแรงสูง……สูงกว่า 1,000V
ตามความถี่การหมุน เครื่อง DC สามารถแสดงเป็น:
ความเร็วต่ำ…….น้อยกว่า 250 รอบต่อนาที
ความเร็วเฉลี่ย……จาก 250 ถึง 1,000 รอบต่อนาที
ความเร็วสูง………….ตั้งแต่ 1,000 ถึง 3,000 รอบต่อนาที
ความเร็วสูงเป็นพิเศษ…..สูงกว่า 3,000 รอบต่อนาที
งานและวิธีการในการปฏิบัติงาน
1.ศึกษาโครงสร้างและวัตถุประสงค์ของแต่ละส่วนของเครื่องใช้ไฟฟ้ากระแสตรง
2. กำหนดขั้วของเครื่อง DC ที่เกี่ยวข้องกับขดลวดกระดองและขดลวดสนาม
ขั้วต่อที่สอดคล้องกับขดลวดเฉพาะสามารถกำหนดได้ด้วยเมกเกอร์, โอห์มมิเตอร์หรือใช้หลอดไฟ เมื่อใช้ megger ปลายด้านหนึ่งจะเชื่อมต่อกับขั้วด้านใดด้านหนึ่งของขดลวดและปลายอีกด้านหนึ่งจะสัมผัสสลับกับอีกด้านหนึ่ง ความต้านทานที่วัดได้เป็นศูนย์จะบ่งบอกว่าขั้วทั้งสองของขดลวดเดียวกันสอดคล้องกัน
3. รับรู้การพันของกระดองและขดลวดของสนามโดยขั้วต่อ กำหนดประเภทของขดลวดกระตุ้น (การกระตุ้นแบบขนานหรืออนุกรม)
การทดลองนี้สามารถดำเนินการได้โดยใช้หลอดไฟไฟฟ้าที่ต่ออนุกรมกับขดลวด ควรใช้แรงดันไฟฟ้ากระแสตรงอย่างราบรื่น โดยค่อยๆ เพิ่มเป็นค่าที่ระบุในหนังสือเดินทางของเครื่องจักร
เมื่อคำนึงถึงความต้านทานต่ำของขดลวดกระดองและขดลวดกระตุ้นแบบอนุกรมหลอดไฟจะสว่างขึ้นและความต้านทานที่วัดด้วยเมกเกอร์ (หรือโอห์มมิเตอร์) จะเท่ากับศูนย์ในทางปฏิบัติ
หลอดไฟที่ต่ออนุกรมกันโดยมีขดลวดสนามขนานจะเรืองแสงสลัวๆ ค่าความต้านทานของขดลวดสนามขนานต้องอยู่ภายในขีดจำกัด 0.3...0.5 โอห์ม .
ขั้วของขดลวดกระดองสามารถรับรู้ได้โดยการเชื่อมต่อปลายด้านหนึ่งของ megger เข้ากับแปรง ในขณะที่แตะปลายอีกด้านเข้ากับขั้วของขดลวดบนแผงเครื่องใช้ไฟฟ้า
ควรระบุขั้วของขดลวดของเครื่องใช้ไฟฟ้าบนฉลากขั้วต่อแบบเดิมที่แสดงในรายงาน
 วัดความต้านทานของขดลวดและความต้านทานของฉนวน สามารถวัดความต้านทานของขดลวดได้โดยใช้วงจรแอมมิเตอร์และโวลต์มิเตอร์ ความต้านทานของฉนวนระหว่างขดลวดและขดลวดที่สัมพันธ์กับตัวเรือนได้รับการตรวจสอบด้วยอัตรา megger สำหรับแรงดันไฟฟ้า 1 kV ความต้านทานของฉนวนระหว่างขดลวดกระดองและขดลวดกระตุ้นและระหว่างพวกมันกับตัวเรือนต้องมีอย่างน้อย 0.5 โมห์ม- แสดงข้อมูลการวัดในรายงาน
วัดความต้านทานของขดลวดและความต้านทานของฉนวน สามารถวัดความต้านทานของขดลวดได้โดยใช้วงจรแอมมิเตอร์และโวลต์มิเตอร์ ความต้านทานของฉนวนระหว่างขดลวดและขดลวดที่สัมพันธ์กับตัวเรือนได้รับการตรวจสอบด้วยอัตรา megger สำหรับแรงดันไฟฟ้า 1 kV ความต้านทานของฉนวนระหว่างขดลวดกระดองและขดลวดกระตุ้นและระหว่างพวกมันกับตัวเรือนต้องมีอย่างน้อย 0.5 โมห์ม- แสดงข้อมูลการวัดในรายงาน
วาดหน้าตัดของเสาหลักโดยคร่าวๆ โดยมีขดลวดสนามและกระดองที่มีขดลวดอยู่ใต้เสา (คล้ายกับรูปที่ 11.10) ควบคุมทิศทางของกระแสในสนามและขดลวดกระดองได้อย่างอิสระ ภายใต้เงื่อนไขเหล่านี้ ให้ระบุทิศทางการหมุนของเครื่องยนต์
ข้าว. 11.10. เครื่อง DC สองขั้ว:
1 เตียง; 2 - สมอ; 3 - เสาหลัก; 4 - ขดลวดกระตุ้น; 5 - ชิ้นเสา; 6 - ขดลวดกระดอง; 7 - นักสะสม; F - ฟลักซ์แม่เหล็กหลัก F คือแรงที่กระทำต่อตัวนำของขดลวดกระดอง
ทดสอบคำถามและงานมอบหมายเพื่อศึกษาด้วยตนเอง
1: อธิบายโครงสร้างและหลักการทำงานของมอเตอร์กระแสตรงและเครื่องกำเนิดไฟฟ้า
2. อธิบายวัตถุประสงค์ของเครื่องสับเปลี่ยนกระแสไฟฟ้ากระแสตรง
3. ให้แนวคิดเรื่องการแบ่งขั้วและแสดงออกถึงความหมายของการแบ่งขั้ว
4.ตั้งชื่อประเภทหลักของขดลวดที่ใช้ในเครื่อง DC และรู้วิธีสร้างขดลวด
5. ระบุข้อดีหลักของมอเตอร์กระตุ้นแบบขนาน
6. อะไรคือคุณลักษณะการออกแบบของการพันสนามแบบขนานเมื่อเปรียบเทียบกับการพันแบบอนุกรม?
7.อะไรคือลักษณะเฉพาะของการสตาร์ทมอเตอร์กระแสตรงแบบตื่นเต้นแบบอนุกรม?
8. คลื่นอย่างง่ายและขดลวดอย่างง่ายของเครื่อง DC มีกิ่งขนานกี่กิ่ง?
9.เครื่อง DC ได้รับการกำหนดอย่างไร? ยกตัวอย่างสัญกรณ์
10. ความต้านทานของฉนวนที่อนุญาตระหว่างขดลวดของเครื่อง DC และระหว่างขดลวดกับตัวเครื่องคือเท่าใด?
11. กระแสสามารถไปถึงค่าใดในขณะที่สตาร์ทเครื่องยนต์หากไม่มีความต้านทานเพิ่มเติมในวงจรขดลวดกระดอง?
12.กระแสสตาร์ทที่อนุญาตสำหรับมอเตอร์คือเท่าไร?
13. ในกรณีใดบ้างที่อนุญาตให้สตาร์ทมอเตอร์กระแสตรงโดยไม่มีความต้านทานเพิ่มเติมในวงจรขดลวดกระดอง?
14. คุณจะเปลี่ยน EMF ของเครื่องกำเนิดการกระตุ้นอิสระได้อย่างไร?
15.เสาเพิ่มเติมของเครื่อง DC มีจุดประสงค์อะไร?
16. อนุญาตให้เปิดมอเตอร์แบบตื่นเต้นได้ภายใต้โหลดใด?
17. ขนาดของฟลักซ์แม่เหล็กหลักถูกกำหนดอย่างไร?
18.เขียนนิพจน์สำหรับแรงเคลื่อนไฟฟ้าของเครื่องกำเนิดไฟฟ้าและแรงบิดของเครื่องยนต์ ให้แนวคิดเกี่ยวกับส่วนประกอบต่างๆ
งานห้องปฏิบัติการ 12.