Під параметр в обмеженні. Технічно оптимальна настройка регуляторів
Регулятори процесу (Process Controllers) - це параметріруемие цифрові контролери з вбудованим набором стандартних функцій для регулювання технологічних змінних (температури, тиску і т.п.).
У якості сигналів завдання (Reference) можуть використовуватися як фіксовані уставки (Fixed Setpoints), так і зовнішні (External).
Аналогові входи використовуються для підключення датчиків зворотного зв'язку (термометрів опору, термопар, манометрів тощо).
Дискретні входи використовуються для завдання фіксованих уставок і перемикання між режимами.
Дискретні виходи використовуються для сигналізації: готовності, аварій, стану.
Релейні виходи використовуються для дискретного управління, а аналогові виходи - для безперервного управління.
дискретне управління
- 2-х позиційний регулятор використовує тільки 2 стани:
- включено (відкрито)
- вимкнено (закрито) Приклад: управління нагріванням або охолодженням.
- 3-х позиційний регулятор використовує 3 стану:
- вимкнено
- обертання за годинниковою стрілкою
- обертання проти годинникової стрілки (реверс) Приклад: управління реверсивним електродвигуном.
- 5-й позиційний регулятор використовує 5 станів:
- вимкнено
- обертання на першій швидкості за годинниковою стрілкою
- обертання на другій швидкості за годинниковою стрілкою
- обертання на першій швидкості проти годинникової стрілки
- обертання на другій швидкості проти годинникової стрілки Приклад: управління 2-швидкісним реверсивним двигуном.
безперервне управління
Для безперервного управління використовуються ПІД-регулятори. Можлива реалізація каскадного (підлеглого) управління.
Замкнута система управління
перехідний процес
Перехідний процес - це реакція системи на зовнішній вплив (завдання, обурення).
Нестійкий (розходиться) перехідний процес

Стійкий (сходиться) перехідний процес
ПІД-регулятор
За допомогою налаштування ПІД-регулятора (PID-controller) ми можемо скоригувати перехідний процес так, як нам потрібно для вирішення свого завдання.

Х зад - заданий (бажане) значення вихідної змінної
X max - верхня допустима межа вихідної змінної
X min - нижній допустиму межу вихідної змінної
Т - період коливань
Т н - час наростання
Т р - час перехідного процесу (остання точка перетину кривої з X min або X max)
А 1 - перше перерегулирование
А 2 - друге перерегулирование
d \u003d А 1 / A 2 - ступінь (декремент) загасання перехідного процесу (відношення першого перерегулювання до другого)
Неузгодженість, перерегулирование, час наростання, час перехідного процесу, ступінь загасання характеризують якість регулювання.
приклад
ПІД-регулятор відкриває і закриває регулюючий вентиль на гарячій трубі так, щоб з крана текла вода з температурою + 40 ° С з похибкою плюс-мінус 2 градуси. Регулятор обчислює неузгодженість (помилку) - відхилення реальної температури (наприклад, + 20 ° С) від заданого значення (+ 40 ° С) і вирішує - коли і наскільки необхідно відкрити гарячий вентиль, щоб температура підвищилася на 20С. Реальну (фактичну) температуру регулятор дізнається за допомогою датчика температури ( зворотній зв'язок), А задану температуру (уставку) йому повідомляє оператор, наприклад, набираючи число «40» на своєму ПК.
Щоб налаштувати ПІД-регулятор, необхідно підібрати правильну комбінацію трьох коефіцієнтів:
- пропорційного - K p
- інтегрального - K i
- диференціального - K d
Можуть використовуватися і більш прості - П і ПІ-регулятори.
Формула ПІД-регулятора
де e (t) - помилка (неузгодженість), u (t) - вихідний сигнал регулятора (керуючий вплив).
Чим більше Пропорціональний коефіцієнт, тим вище швидкодія, але менше запас стійкості. Але! простий П-регулятор не може повністю відпрацювати неузгодженість, тобто завжди працює з помилкою.
ПІ-регулятор дозволяє позбутися від статичної (усталеною) помилки, але, чим більше Інтегральний коефіцієнт, тим більше перерегулирование (динамічна помилка).
ПІД-регулятор дозволяє нам зменшити перерегулювання, але, чим більше Діфференціальний коефіцієнт, тим більша похибка через вплив шумів.
Якщо шуми йдуть по каналу зворотного зв'язку, то ми можемо їх відфільтрувати за допомогою фільтра низької частоти, але чим більше постійна цього фільтра, тим повільніше регулятор буде відпрацьовувати обурення.
Налаштування ПІД-регулятора за методом Циглера-Ніколса
Циглер і Ніколс запропонували свій варіант швидкого налаштування ПІД-регулятора для періодичного перехідного процесу, в якому загасання приблизно дорівнює 4.
- Обнуляємо K i і K d
- Поступово збільшуємо Kp до критичного значення K c, при якому виникають автоколивання
- Вимірюємо період автоколивань Т
- Обчислюємо значення K p, K i і K d за різними формулами для різних регуляторів:
- для П-регулятора: K p \u003d 0,50 * K c
- для ПІ-регулятора: K p \u003d 0,45 * K c, K i \u003d 1,2 * K p / T
- для ПІД-регулятора: K p \u003d 0,60 * K c, K i \u003d 2,0 * K p / T, K d \u003d K p * T / 8
Каскадний регулятор (підпорядковане управління)
продовження прикладу
Тепер нам захотілося додати комфорту і зробити так, щоб уставка завдання температури води змінювалася залежно від температури повітря на вулиці (на вулиці мороз - вода гаряча, на вулиці спека - вода прохолодна). Можна встановити ще один регулятор комфортної температури, який за свідченнями термометра дізнається фактичну температура зовнішнього повітря і вирішує, що комфортна температура води повинна бути, наприклад, + 40 ° С, тому він видає завдання регулятору температури води - підтримувати температуру на рівні + 40С (див . приклад вище). Тут ми маємо каскадне регулювання: контур регулювання температури води підпорядкований контуру регулювання комфортної температури води.
За допомогою регуляторів процесу ми можемо реалізувати і більш складні зв'язку. Наприклад, підтримувати постійну витрату і температуру води, незалежно від тиску і температури гарячого і холодного трубопроводів.
Попереджувальне регулювання (Feedforward Control)
Не завжди простий ПІД-регулятор в системі зі зворотним зв'язком може забезпечити необхідну швидкодію через виникнення небажаних коливань або неприпустимо великого перерегулирования. Для поліпшення характеристик регулювання застосовують комбіноване управління - зі зворотним зв'язком (closed-loop) і без зворотного зв'язку (open-loop). До керуючому впливу (виходу регулятора) додається сигнал попереджувального впливу, який не залежить від неузгодженості, а значить, не може викликати автоколебания в системі.
продовження прикладу
Якщо ми довіряємо прогнозом погоди, то замість каскадного управління ми можемо реалізувати попереджувальне регулювання без вимірювання вуличної температури: читаємо прогноз на завтра, задаємо уставку + 40 ° С за таймером часу на завтра на 7 ранку.якщо виміряти обурення, То можна подати випереджаюче вплив, яке компенсує вплив цього обурення на процес до того, як почне змінюватися регульований параметр.
Для визначення оптимальних параметрів настройки регуляторів (параметричної оптимізації) АСР необхідно мати відомості про статичні і динамічні характеристики об'єкта регулювання і діючих збурень. Найбільш достовірними є експериментально певні статичні характеристики.
Оптимальна настройка ПІД-регулятора дозволяє максимально швидко і майже без перерегулювання вивести об'єкт на уставку. Ознака правильного налаштування - плавний, без ривків, зростання регульованого параметра і наявність гальмують імпульсів при підході до уставці як знизу, так і зверху (рис. 14.39).
Якщо об'єкт виходить на уставку з невеликим перерегулюванням і бистрозатухающімі коливаннями, можна трохи зменшити коефіцієнт посилення, залишивши всі інші параметри без зміни.
Величина максимуму амплітудно-частотної характеристики замкнутої системи регулювання, а також її резонансна частота можуть бути визначені з тимчасової характеристики системи щодо керуючого впливу за умовною величиною її ступеня загасання і частоті (рис. 14.40).
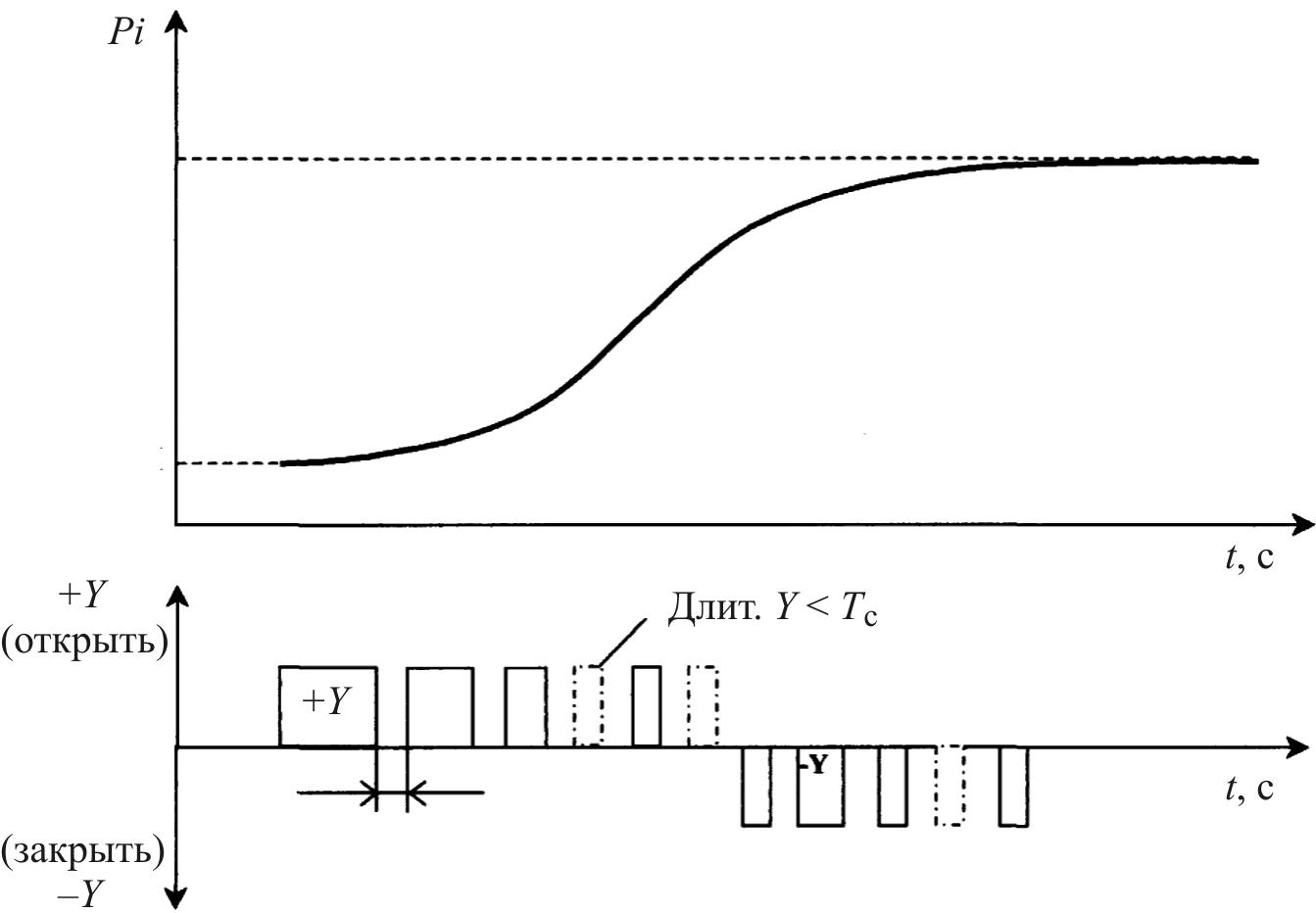
Мал. 14.39. Оптимальна робота ПІД-регулятора

Мал. 14.40. Перехідна характеристика замкнутої системи регулювання
Вказана обставина дозволяє приблизно визначити параметри регульованого об'єкта іпо отриманої експериментально кривої перехідного процесу при східчастому вплив з боку задатчика регулятора. Дійсно, якщо відомі ступінь загасання перехідного процесу і його частота, а також числові значення параметрів настройки регулятора, при яких реєструвався цей процес, то принципово не становить труднощів визначити, якими мають бути числові значення параметрів об'ектаідля того, щоб амплітудно-фазова характеристика розімкнутої системи з відомими параметрами налаштування регулятора стосувалася окружності з індексом, відповідним цього ступеня загасання при частоті, відповідній частоті перехідного процесу.
Порядок визначення оптимальної настройки ПІ-регулятора за графіком тимчасової характеристики замкнутої системи регулювання за допомогою графіків полягає в наступному:
1. Система регулювання при довільній налаштування регулятора включається в роботу. Переконавшись, чтоона працює стійко, швидко змінюють завдання регулятору на деяку досить велику, але допустиму за умовами експлуатації величину і реєструють процес зміни регульованої величини в часі.
2. З отриманого графіка зміни регульованої величини, типовий вигляд якого наведено на рис. 14.40, визначаються ступінь загасання і період коливань перехідного процесу Т.
3. Обчисливши величину відносини періоду коливань перехідного процесу до встановленого в регуляторі під час проведення експерименту значенням часу ізодрома, знаходять величини поправочних множників на величину коефіцієнта передачі регулятора і на величину його часу ізодрома, тобто визначають, у скільки разів слід змінити числові значення параметрів настройки регулятора, щоб настройка виявилася близькою до оптимальної.
4. Встановивши знайдені параметри налаштування в регуляторі, досвід повторюють і роблять повторний розрахунок, аналогічний викладеному вище. Якщо виявиться, що числові значення поправочних коефіцієнтів близькі до одиниці (знаходяться в межах 0,95-1,05), можна вважати, що настройка закінчена. В іншому випадку необхідно провести повторну перенастроювання.
У практиці налагоджувальних робіт використовують наближені формули для визначення оптимальних параметрів настройки регуляторів для об'єктів, що описуються нижченаведеними виразами при різних критеріях оптимальності.
1. Всесоюзним теплотехнічним інститутом імені Ф.Е. Дзержинського (ОТІ)рекомендуються для ступеня загасання за період \u003d 0,75 і інтегральної квадратичної оцінки, близькою до мінімуму, такі формули розрахунку для параметрів ПІ-регулятора з передавальної функцією:
W(P) =K p ( Т з Р+ 1)/Т з Р.
при 0< об /Т а< 0,2
, Т з = 3,3 об.
при 0,2< об /Т а< 1,5
, Т з = 0,8Т а .
При \u003d 0,9, 0< об /Т а< 0,1
![]() ,
Т з
\u003d 5 об.
,
Т з
\u003d 5 об.
при 0,1< об /Т а< 0,64
, Т з = 0,5Т а .
2. Є номограмидля подібних об'єктів, щоб в залежності від параметрів об'єкта і заданого загасання визначити K р ,Т з (Метод Ротача).
3. Існує метод компенсації великий постійноїчасу об'єкта (Т з = Т про ) При коефіцієнті демпфірування = 707 (Модульний оптимум).
4. Аналітичний розрахунок кордону стійкості і параметрів регулятора при заданої ступеня колебательности по розширеним частотним характеристикам(Метод Стефані)також застосовується при наявності ЕОМ і відповідних методик розрахунку. Всі методики дають близькі результати розрахунку параметрів регулятора і, відповідно, близькі перехідні процеси.
5. На практиці розрахунки регуляторів закінчуються налагоджувальними роботами, коли використовуються експериментальні методи параметричної оптимізації.
Ці методи засновані на прямому контролі перехідних або частотних характеристик в процесі підбору оптимальних параметрів настройки або з параметрами, свідомо забезпечують стійкий рух АСР. Потім, вводячи обурення, спостерігають реакцію системи на ці обурення. Цілеспрямовано змінюючи параметри налаштування регулятора, домагаються потрібного характеру перехідного процесу. Це багатокрокова итерационная процедура. Дані методи розроблені настільки, що дозволяють автоматизувати цей процес за мінімальної участі людини 3.
Найпростіша настройка, коли в замкнутій АСР з ПІ-регулятором (при ПІ-регуляторі Т з встановлюють дуже великим) збільшують K p до кордону стійкості, визначають K p .кр і Т пер.кр – період сталих коливань. Потім виставляють параметри:
Для П-регулятора K p .опт = 0,55 K p .кр;
Для ПІ-регулятора K p .опт \u003d 0,55 K p .кр, Т з \u003d 1,25 Т пер.кр.
6. Кращі результати дає покрокова оптимізаціяз оцінкою перехідної характеристики на кожному кроці .
У площині параметрів настройки ПІ-регулятора існують лінії однаковою мірою загасання (рис. 14.41).
Одне і те ж затухання (нехай ψ \u003d 0,75) можна отримати при різних параметрах регулятора. Потрібно забезпечити при цьому мінімальну квадратичную помилку, яка змінюється в площині як показано на рис. 14.42. Таким чином, треба шукати оптимальну точку настройки.

З кривих (рис. 14.43) для різних налаштувань можна бачити, що в точках 1 і 2 перехідні процеси затягнуті, в точці 4 є апериодическая складова, яка затягує процес. Пошук оптимальної настройки складається з наступних етапів (рис. 14.44, 14.45):
1. Завищують Т з, занижують K р (Точка 1).
2. Збільшують K р , Щоб при коливальному процесі ψ \u003d 0,8-0,9 (точка 2 ).


Мал. 14.44. Етапи практичної настройки параметрів ПІ-регулятора
3. Зменшують Т з, щоб позбутися від аперіодичної складової (точки 3 ,4 ).
4. Зменшують K р , Щоб пріψ \u003d 0,95 ... 1 і при різних варіаціях динамічних властивостей об'єкта регулювання перехідні процеси були слабоколебательнимі (точка 5 ).
Даний метод оптимізації не вимагає точного визначення параметрів об'єкта і параметрів регулятора, так як варіювання параметрів настройки виробляють щодо вихідних значень, тому він широко застосовується.
Мал. 14.45. Характер перехідних процесів при різних настройках параметроврегуляторов
Наприклад, в інструкції для наладчика САР з цифровим ПІ-регулятором дані наступні рекомендації.
регулятор налаштований на ПІ-регулювання;

Мал. 14.46. Перехідний процес вихідного сигналу ПІ-регулятора
структурна схема управління приведена на рис. 14.47;
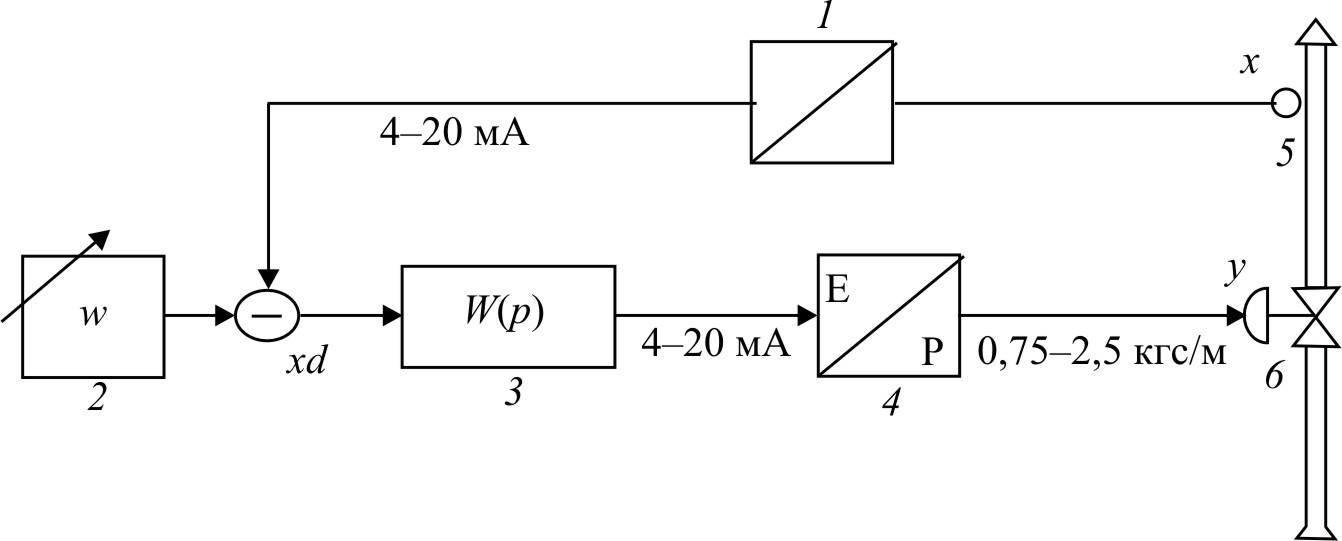
Мал. 14.47. Структурна схема управління об'єктом з пневматичним виконавчим механізмом: w- задає вплив; x- регульована величина; xd- відхилення регульованої величини; y- керуючий вплив; 1 - вимірювальний перетворювач; 2 - задатчик величини; 3 - регулювальний підсилювач; 4 - електропневматичний перетворювач сигналу; 5 - датчик; 6 - пневматичний виконавчий блок
- пропорційний коефіцієнт K р = 0,1;
- час ізодрома T n \u003d 9984 с;
- час передування T v =oFF;
- настройка параметрів ПІ-регулятора:
встановити бажану задану величину і в ручному режимі встановити розузгодження регулювання на нуль;
переключитися на автоматичний режим;
повільно збільшувати K р , Поки регулюючий контур через малі зміни заданої величини не почне хилитися до коливань;
незначно зменшувати K р , Поки коливання не будуть усунені;
зменшувати T n до тих пір, поки регулюючий контур знову не почне хилитися до коливань;
повільно збільшувати T n до тих пір, поки ухил до коливань, не буде усунений.
квиток №16
насоси - машини, які подають рідини;
вентилятори і компресори - машини, що подають повітря і технічні гази.
вентилятор- машина, що переміщає газове середовище при ступеня підвищення тиску Ер< 1,15 (степень повышения давления Ер - отношение давления газовой среды на выходе из машины к давлению ее на входе).
компресор- машина, що стискає газ з Ер\u003e 1,15 і має штучне (зазвичай водяне) охолодження порожнин, в яких відбувається стиснення газів.
Згідно ГОСТ 17398-72 нагнітачі (насоси) поділяються на дві основні групи: насоси динамічні і об'ємні.
У динамічних нагнітачах передача енергії рідини або газу відбувається шляхом роботи масових сил потоку в порожнині, постійно з'єднаної з входом і виходом нагнітача.
В об'ємних нагнітачах підвищення енергії робочого тіла (рідини або газу) досягається силовим впливом твердих тіл, наприклад поршнів в поршневих машинах в робочому просторі циліндра, періодично з'єднуються за допомогою клапанів з входом і виходом нагнітача.
За інших рівних умов пропорційно-інтегрально-диференціальні або ПІД (PID - Proportional-Integral-Derivative) регулятори дозволяють підняти точність управління в 5-100 разів у порівнянні з позиційним регулятором.
Найбільш часто в задачах АСУ ТП застосовуються двопозиційне регулювання і ПІД регулювання.
Двопозиційне регулювання забезпечує включення або відключення виконавчого пристрою (наприклад, нагрівача) в залежності від того, нижче або вище виміряний параметр щодо заданого рівня. При двопозиційний регулювання в системі завжди присутнє коливання технологічного параметра, причому розмах цих коливань визначається тільки параметрами системи (інерційністю датчиків, виконавчого пристрою і самої системи) і практично не залежить від регулятора.
При ПІД регулювання сигнал управління залежить від різниці між виміряним параметром і заданим значенням, від інтеграла, від різниці і від швидкості зміни параметрів. В результаті ПІД регулятор забезпечує такий стан виконавчого пристрою (проміжне між включений або виключений), при якому вимірюється параметр дорівнює заданому. Оскільки стан виконавчого пристрою стабілізується, точність підтримки параметра в системі підвищується в десятки разів. Таким чином, закон регулювання забезпечує точність.
В принципі, точність підтримки буде визначатися точністю вимірювання сигналу і інтенсивністю зовнішніх впливів на об'єкт.
Pb - початкова температура в системі
ti - постійна часу інтегрування
td - постійна часу диференціювання
Сигнал управління для ПІД регулятора визначається трьома компонентами:

(П - пропорційна компонента)
Сигнал управління, який виробляє регулятор, визначається тим, наскільки велике неузгодженість (пропорційна компонента), наскільки довго зберігається неузгодженість (інтегральна компонента) і, нарешті, як швидко змінюється неузгодженість (диференціальна компонента).
Якість управління, яке забезпечує ПІД регулятор в значній мірі залежить від того, наскільки добре вибрані параметри регулятора відповідають властивостям системи. Це означає, що ПІД регулятор перед початком роботи необхідно налаштувати.
Якість регулювання ПІД-регулятора визначається точністю настройки його параметрів. Існує багато різних методик настройки ПІД регуляторів. В основі більшості з них лежить аналіз перехідної характеристики.
Етап 1. Налаштування пропорційної компоненти ПІД-регулятора
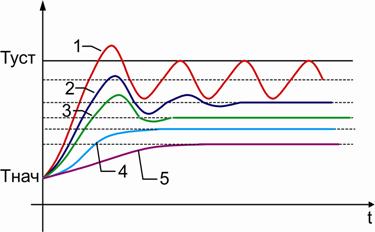
Перед налаштуванням зони пропорційності інтегральна і диференціальна компоненти відключаються, або постійна інтегрування встановлюється максимально можливої, а постійна діфференцірованія- мінімально можливою. Встановлюється необхідна уставка SP. Зона пропорційності встановлюється рівною 0 (мінімально можливої). В цьому випадку регулятор виконує функції двохпозиційного регулятора. Реєструється перехідна характеристика.
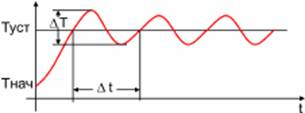
Тнач - початкова температура в системі
Туст - задана температура (уставка)
Δ Т розмах коливань температури
Δ t - період коливань температури
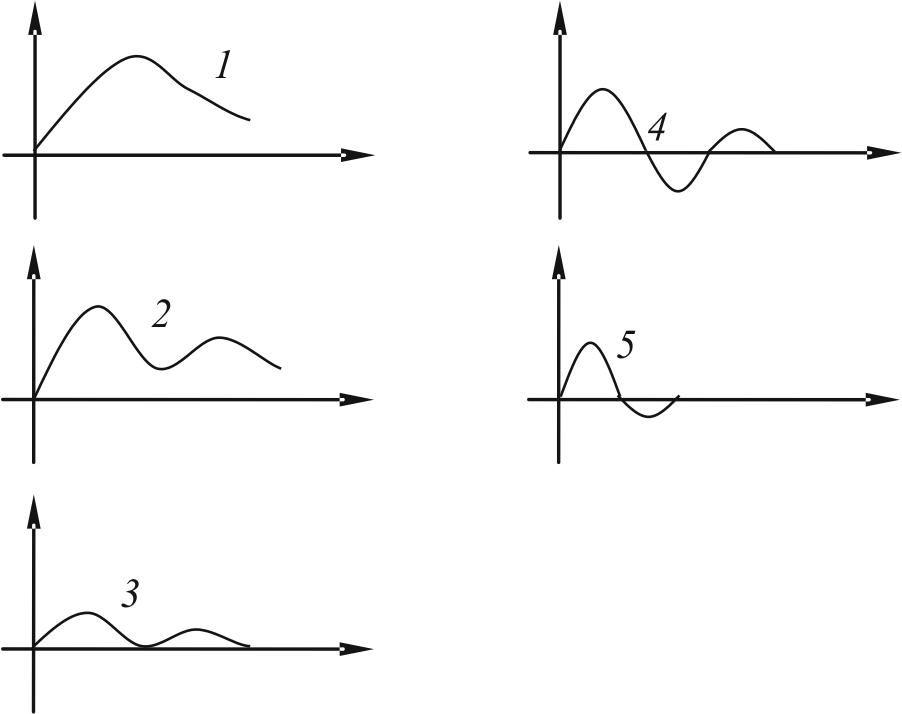
Встановити зону пропорційності дорівнює розмаху коливань температури: Pb \u003d Δ Т. Це значення служить першим наближенням для зони пропорційності. Слід проаналізувати перехідну характеристики ще раз і при необхідності скоригувати значення зони пропорційності. Можливі варіанти перехідних характеристик показані на рис.2.
Перехідна характеристика типу 1
Значення зони пропорційності як і раніше дуже мало, перехідна характеристика (а значить, і настройка регулятора) далека від оптимальної. Зону пропорційності слід значно збільшити.
В перехідній характеристиці спостерігаються затухаючі коливання (5-6 періодів). Якщо в подальшому передбачається використовувати і диференціальну компоненту ПІД регулятора, то вибране значення зони пропорційності є оптимальним. Для цього випадку настройка зони пропорційності вважається закінченою.
Якщо в подальшому диференціальна компоненти використовуватися не буде, то рекомендується ще збільшити зону пропорційності так, щоб вийшли перехідні характеристики типу 3 або 4.
В перехідній характеристиці спостерігаються невеликий викид і швидко затухаючі коливання (1-2 періоди). Цей тип перехідної характеристики забезпечує гарну швидкодію і швидкий вихід на задану температуру. У більшості випадків його можна вважати оптимальним, якщо в системі допускаються викиди (перегріви) при переході з однієї температури на іншу.
Викиди усуваються додатковим збільшенням зони пропорційності так, щоб вийшла.
Перехідна характеристика типу 4
Температура плавно підходить до сталого значення без викидів і коливань. Ця тип перехідної характеристики також можна вважати оптимальним, однак швидкодія регулятора трохи зменшено.
Перехідна характеристика типу 5
Сильно затягнутий підхід до сталого значення говорить про те, що зона пропорційності надмірно велика. Динамічна та статична точність регулювання тут мала.
Слід звернути увагу на дві обставини. По-перше, у всіх розглянутих вище випадках стале значення температури в системі не збігається зі значенням уставки. Чим більше зона пропорційності, тим більше залишкове неузгодженість. По-друге, тривалість перехідних процесів тим більше, чим більше зона пропорційності. Таким чином, потрібно прагнути вибирати зону пропорційності якомога менше. Разом з тим, залишкове неузгодженість, характерне для чисто пропорційних регуляторів (П-регуляторів), забирається інтегральної компонентою регулятора.
Етап 2. Встановлення диференціальної компоненти (td) ПІД-регулятора

Цей етап присутній тільки в тому випадку, якщо застосовується повнофункціональний ПІД регулятор. Якщо диференціальна компонента застосовуватися не буде (використовується пропорційно-інтегральний (ПІ) регулятор), то слід відразу перейти до етапу 3 (Налаштування інтегральної компоненти ti).
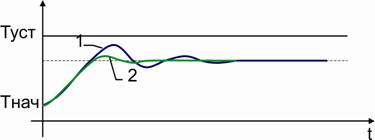
На етапі налаштування зони пропорційності встановлена \u200b\u200bзона пропорційності, відповідна перехідною характеристиці типу 2, в якій присутні затухаючі коливання (див. Рис.1, крива 2, рис.3, крива 1.). Слід встановити постійну часу диференціювання так, щоб перехідна характеристика мала вигляд кривої 2 на рис.2. В якості першого наближення постійна часу диференціювання робиться рівною td \u003d 0,2Δ t.
Примітно те, що диференціальна компонента усуває затухаючі коливання і робить перехідну характеристику, схожою на тип 3 (див. Рис.1). При цьому зона пропорційності менше, ніж для типу 3. Це означає, що динамічна і статична точність регулювання при наявності диференціальної компоненти (ПД-регулятор) може бути вище, ніж для П-регулятора.
Етап 3. Налаштування інтегральної компоненти (ti) ПІД-регулятора
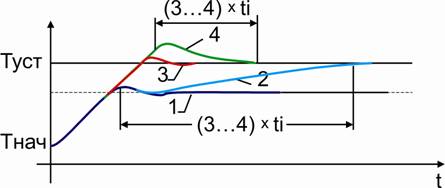
Після настройки пропорційної компоненти (а при необхідності і диференціальної компоненти) виходить перехідна характеристика, показана на рис., Крива 1. Інтегральна компонента призначена для того, щоб прибрати залишкове неузгодженість між сталим в системі значенням температури і уставкой. Починати налаштовувати постійну часу інтегрування слід з величини, рівної Δ t.
Перехідна характеристика типу 2
Виходить при надмірно великій величині постійної часу інтегрування. Вихід на уставку виходить дуже затягнутим і триває приблизно (3 ... 4) ti.
Перехідна характеристика типу 4
Виходить при занадто малій величині постійної часу інтегрування. Вихід на уставку також триває (3 ... 4) ti. Якщо постійну часу інтегрування зменшити ще, то в системі можуть виникнути коливання.
Перехідна характеристика типу 3
Оптимальна.
підсумок
Таким чином, ми розглянули процес поетапної настройки різних компонент ПІД-регулятора. На кожному етапі контролювався вид перехідної характеристики і при необхідності коректувалися значення параметрів ПІД-регулятора. При цьому початковими значеннями параметрів служили параметри перехідної характеристики, отриманої для двохпозиційного регулятора, а саме: Pb \u003d Т; ti \u003d Δt; td \u003d 0.2Δt. Досвід показує, що для більшості випадків ці значення параметрів забезпечують настройку ПІД-регулятора, близьку до оптимальної, і подальша корекція параметрів не потрібно.
Для процесів системи потрібна здатність параметрів до реагування на зовнішній вплив і підтримку системних постійних величин. Для прикладу, система насосів з клапанами відведення. Для кожного клапана підтримку потоку в незмінному вигляді забезпечує постійний тиск в трубах. Помпа в системі наводиться в дію приводом, при відкриванні клапана швидкість двигуна збільшується і знижується при закритті, щоб підтримувати тиск в трубах на одному рівні.
Для такого підтримки тиску існує прилад, який називається регулятором завдання. Тиск в трубах на датчику йде в порівняння з параметром заданого тиску. Регулятор порівнює системний тиск з тиском завдання, визначає завдання швидкості для двигуна для зміни помилки. Простий вид регулятора застосовує план дій ПІД-регулювання. У ньому застосовуються три складові типу регуляторів для видалення помилки: диференційний, інтегральний і пропорційний регулятор.
Регулятор пропорційного типу.
Такий регулятор - головний, швидкість задається в прямій залежності від помилки. При застосуванні пропорційної регулятора система матиме помилку. Малі значення коефіцієнта регулятора пропорційного типу дають млявість системи, а високі параметри до коливань і нестабільності системи.
Регулятор інтегрального типу.
Такий регулятор застосовується для видалення помилки. Швидкість збільшиться до видалення помилки (знизиться при негативної помилку). Невеликі значення підсумовує складової занадто впливають на діяльність регулятора в загальному. При встановленні великих значень відбувається промахивание системи, вона функціонує з перерегулюванням.

Регулятор диференціального типу.
Такий регулятор вимірює швидкість виправлення помилки, застосовує для підвищення системного швидкодії, збільшує регуляторний швидкодію в загальному. Під час збільшення швидкодії регулятора підвищується перерегулювання. Це обумовлює до системної нестабільності. У багатьох випадках складова диференціальна стає рівною нулю або близькою до найменшого значення для того, щоб запобігти цьому стану. Вона буває корисною в позиціонує системі.

Робота регулятора в зворотному і прямому дії.
Безліч регуляторів мають принцип прямої дії. Підвищення швидкості двигуна призводить до підвищення змінної величини процесу. Це випадок в системі насосів, тиск це величина змінна процесу. Підвищення швидкості двигуна обумовлює підвищення тиску. У багатьох системах підвищення швидкості двигуна обумовлює до зниження параметра змінної процесу. Температура речовини, яке обдувається вентиляційною системою теплообмінника - процессная змінна величина: при підвищенні швидкості вентиляційної системи температура речовини знижується. У цьому разі потрібно застосувати регулятор дії зворотного виду.
Настроювання ПІД-регулятора.
Для моторної керованості системи настроювання ПІД-регулятора буває складним процесом. Розповімо, які кроки для настройки можуть зробити простіше цю процедуру.
- 1. Визначте значення диференціальної і інтегральної рівною нулю. Визначте найбільшу швидкість і контролюйте системну реакцію.
- 2. Підвищуйте складову прямопропорційно і виконайте перший пункт. Продовжуйте дії до моменту початку процесу з автоматичними коливаннями біля точки визначення швидкості.
- 3. Знижуйте пропорційну величину, поки система не стабілізується. Хвилі коливань почнуть загасати.
- 4. Визначте пропорційну величину близько 15% менша за цей постійного пункту.
- 5. Визначайте найбільшу швидкість переривчасто, підвищуйте підсумовує складову до початку зменшення коливань швидкості перед стабільним станом системи. Знижуйте підсумовує складову до досягнення системою певної швидкості без помилки і коливань.
- 6. У багатьох системах настроювання складової диференціального виду не потрібно. Якщо потрібно швидкодію системи більше, то можна досягти цього шляхом настройки складової диференціального виду. Встановлюйте швидкість по інтервалах, підвищуйте складову диференціального виду, поки не стабілізується система з найменшим часом дії (підвищуйте повільно, уникаючи стану нестабільності). Система стане оптимальною при одному перерегулюванням.
- 7. Контролюйте стабільність системи, встановлюючи значення швидкості з інтервалами і періодами для гарантованої стабільності системи при поганому виконанні завдання.
Настроювання датчика на 20 міліампер ПІД-регулюванням.
1.Действія в програмному меню.
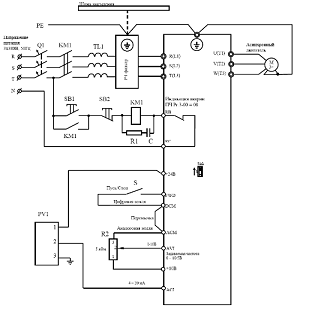
Керуюча панель частотного перетворювача А300 складається з 3-рівневої структури:
- · Групи опціональних значень (1 рівень).
- · Опциональниє значення (2 рівень).
- · Параметр опционального значення.

2.Настраіваніе характеристик електромотора і визначення напрямку моменту.
Встановити метод в значенні Р0-02:
- · Р0-02 \u003d 0 (настройка заводу, пульт перетворювача).
- · Р0-02 \u003d 1 (вхідні команди зовнішнього управління D1-D7).
Встановити характеристики номінального значення електромотора (застосовуйте параметри з таблички і паспорта електромотора):
- · Потужність номіналу Р1-01 \u003d встановіть значення.
- · Напруга номіналу Р1-02 \u003d встановіть значення (по заводських налаштувань 380 вольт).
- · Струм номіналу Р1-03 \u003d встановіть значення.
- · Частота номіналу Р1-04 \u003d встановіть значення (по заводських налаштувань 50 герц).
- · Обороти номінального значення Р1-05 \u003d встановіть значення.
Після приєднання і введення параметрів потрібно проконтролювати напрямок крутного моменту електромотора. Після відключення меню програми на екрані з'явиться 50 герц, клавішею «вниз» встановіть найменшу частоту для завдання напряму крутного моменту. Для запуску двигуна натисніть клавішу «пуск» (параметр Р0-02 \u003d 0), визначте напрямок моменту обертання, загальмуєте мотор, натиснувши клавішу «стоп». Якщо обертання не збігається з напрямком, то змініть дві будь-які фази харчування мотора (заміну фаз виробляти при відключеному частотники) або поміняйте параметр настройки Р0-09 \u003d (0-вперед, 1-назад). Ще раз перевірте момент обертання, натиснувши клавішу «пуск», якщо напрямок моменту обертання збігається, то загальмуєте мотор, натиснувши клавішу «стоп». Натисніть кнопку «вгору» і поверніть налаштовану частоту 50 герц.
3.Подсоедіненіе датчика (вихід на 20 міліампер).
- · Установку виробляти при вимкненому живленні частотного перетворювача.
- · Напруга датчика під'єднати до контакту «+ 24В», сигнал з'єднати з контактом «AI1», встановити перемичку на контакти «COM» і «GND».

Переставити з'єднання «J1» в стан «I».

4. Контроль зворотного зв'язку.
- · Підключіть напруга на частотний перетворювач, На екрані виникне підсвічування 50 герц.
- · Натисніть кнопку «зрушення» 2 рази.
- · На екрані буде параметр зворотного зв'язку в інтервалі 0-10 (0-20 мА), залежить від параметра, що набудовує.
Зв'язок зворотного виду (4 мА).

- · Після підтвердження зворотного зв'язку натисніть три рази клавішу «зрушення», з'явиться на екрані 50 герц.
- · Встановіть найменше значення сигналу входу в величині Р4-13 \u003d 2.00 (4 мА).
5. Як налаштовувати значення параметра ПІД-регулювання.
- · Встановіть джерело основної частоти Р0-03 \u003d 8 (частоту визначає ПІД-регулятор).
- · Поставте значення ПІД-регулятора в значення РА-01 \u003d результат підтримуваної величини у відсотках (від 0 до 100%) від інтервалу датчика, РА-01 \u003d (результат підтримуваного параметра / діапазон датчика) * 100%.
Приклад установки значення:
Приєднаний датчик тиску на 16 бар з сигналом виходу від 4 до 20 мА. Для тиску в 10 бар потрібно встановити значення
РА-01 \u003d (10/16) * 100% \u003d 62,5%
Проведіть тестовий пуск. Перевіряйте підтримуване значення параметра за приладами, дублюючим вимірювання (ротаметр, термометр, манометр). Якщо система регулювання функціонує нестабільно або довгий відгук на заміну параметра, то застосовуйте цим параметром РА-05, -06, -07. Ці значення призначені для точного налаштування ПІД-регулятора.
Приклад використання регулювання ПІД.
Дані.
- · Механізм вентиляторного управління.
- · Характеристика градуировочная датчика тиску, інтервал 1000-5000 Па, ток 4-20 мА.
- · Значення тиску 1500 Па.
- · Потужність механізму і інерційні дані вентилятора відсутні.
Зовнішні підключення.
Датчик зворотного зв'язку приєднаний до токовому входу аналогового типу, датчик значення уставки до входу аналогового типу напруги.
Зворотній зв'язок.
Датчик зв'язку визначено за струмовим виходу, входом зв'язку зворотного виду застосовується струмовий вхід. Здається РR.10-00 \u003d 02 (зворотний зв'язок з мінусом по входу, підвищення частоти виходу, підвищує тиск).
Отградуірованная характеристика датчика.

Сигнал зв'язку зворотного виду в масштабі.
Вхід зв'язку зворотного виду не створює масштаб щодо посилення і зміщення. Застосовуючи параметр PR10-01 можна змінювати значення сигналу зв'язку зворотного виду в розрахунках.
Застосування параметра PR10-01 для коригування значення сигналу зв'язку зворотного типу.
Значним PR10-01 можна коригувати значення сигналу зв'язку зворотного виду, який застосовується в обчисленнях. Інтервал пропорційності 0-10, з налагодження заводу 1.
Сигнал зв'язку зворотного виду підвищується в 2 рази перед установкою в ПІД-регулятор. Це так само зниження інтервалу входу в 2 рази.
Сигнал зв'язку зворотного виду знижується в 2 рази перед установкою в регулятор, це еквівалентно збільшенню інтервалу входу в 2 рази. Зараз інтервал обмежений значенням датчика.
Приклад установки значення параметра PR10-01 (масштаб посилення зворотного зв'язку).
Інтервал дії датчика:
1000Ра - 5000Ра.
Найбільший тиск функціонування: 2000Ра.
Застосовувана частина інтервалу роботи датчика (закріплена): -1000Ра-2000Ра.
Це дорівнюватиме: 2000Ра - (- 1000Ра)
5000Ра - (- 1000Ра) \u003d 50%
Якщо інтервал дії не більше 2000Ра з датчиком, то величина параметра
PR10-01 \u003d 1/50% \u003d 2
Формула обчислення параметра PR10-01.
Найбільший сигнал датчика: MaxVal
Найменший сигнал датчика: MinVal
Найбільший потрібний сигнал зв'язку зворотного виду MaxFBVal
Величина значення ПІД (встановлена \u200b\u200bчастота).
Встановлену частоту можна змінювати операторами нахилу і переміщення опції перетворення.
Напрямок моменту обертання установки вентилятора не змінюється, краще застосовувати AVI вхід із завданням значення PR 02-00 \u003d 01.
PR10-01 (найвища частота).
Задати в PR01-00 величину максимальної частоти механізму вентиляції (PR01-00 \u003d 50 герц).
Найменша частота.
Найменша частота не впливає на дію регулювання.
Нахил і переміщення опції перетворення.
Задати PR04-00 AVI переміщення інтервалу.
PR04-01 AVI полярність.
PR04-02 AVI коригування нахилу.
Обертання здійснюється в одну сторону, PR04-03 \u003d 0 (по заводських налаштувань).
Величина уставки.
Для установки величини входу інтервал частоти розраховується 0-100%.
Установка значення уставки.
При функціонуванні вентилятора тиску в 1500 Ра дорівнює сигнал датчика 10,67 мА. Величиною уставки 1500 Ра дорівнює частота виходу 42% * 50 герц \u003d 21 герц і 84% * 50 герц \u003d 42 герц.
Можна встановлювати значення в Ра. Якщо 100% інтервалу дорівнює 2000 Ра, то при коефіцієнті 00-05 \u003d 2000 / Fmax \u003d 2000/50 \u003d 40, встановлена \u200b\u200bвеличина 1500 і задається 1500 Ра.
Інтервал частоти виходу.
Верхня межа частоти виходу при регулюванні визначається формулою:
Fmax \u003d Pr01-00хPr10-07.
ПІД-регулювання.
Прискорення - уповільнення.
При взаємодії з регулюванням ПІД потрібен час прискорення і уповільнення встановлювати мінімальним для якісної регулювання.
Настроювання регулятора.
- · Поставити величину I для легкого відгуку, без перерегулювати.
- · Значення параметра для вентилятора не потрібно, через уповільнення процесу.
- · Поставити інші значення величин.
- · Підвищення Р розганяє процес, знижує помилки.
- · При великому Р з'являється нестійкість процесу.
- · Зниження величини I прискорює процес, робить нестабільним.
- · Швидкість дає зниження Р і I.
- · Уповільнення вентилятора визначає більшого значення Р.
- · Задайте час прискорення і уповільнення найменшим.